車両用電気モータの基本がわかる!種類・仕組み・駆動システム・制御を解説

HEV(ハイブリッド車)、PHEV(プラグインハイブリッド車)、EV(電気自動車)、FCEV(Fuel Cell Electric Vehicle、燃料電池電気自動車)などの電動車両では、走行用の駆動源として電気モータが重要な役割を担っています。
今回のコラムでは、車両用電気モータの種類や作動原理、モータに用いられる磁石の特徴に加え、電気モータを用いた駆動システム、インバータ・コンバータによる電流変換、車両におけるモータ制御の考え方について解説します。
目次
1.車両用電気モータの主な種類(分類)
車両用電気モータの分類は切り口や通称が多く複雑ですが、コイル巻き線、電源、ブラシ構造、そして車載構造について、分類・整理したものを以下図(A)に示します。
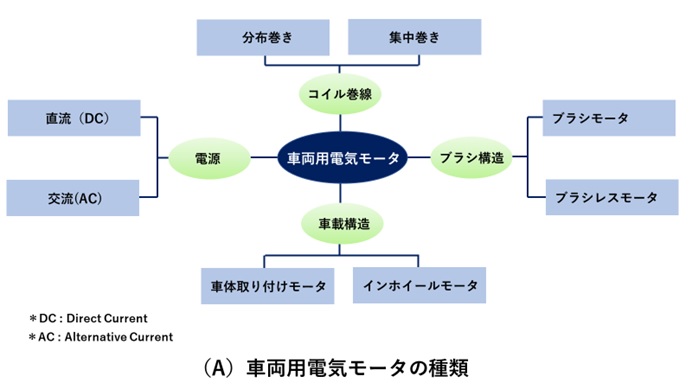
「インホイールモータ」は、タイヤホイールの内部に駆動用モータを配置するもので、「ハブモータ」とも呼ばれます。
[※関連記事:インホイールモータの構造・仕組み、メリットと技術課題をわかりやすく解説 ]
また、交流モータ(ACモータ)の中に「同期モータ」と呼ばれるものがあります。
「同期モータ」とは、ステータ(固定子)に供給した交流電流によって回転磁界を発生させ、その回転磁界にロータ(回転子)が同期して回転するモータです。
以下図(B)に、同期モータの代表的な種類をまとめました。
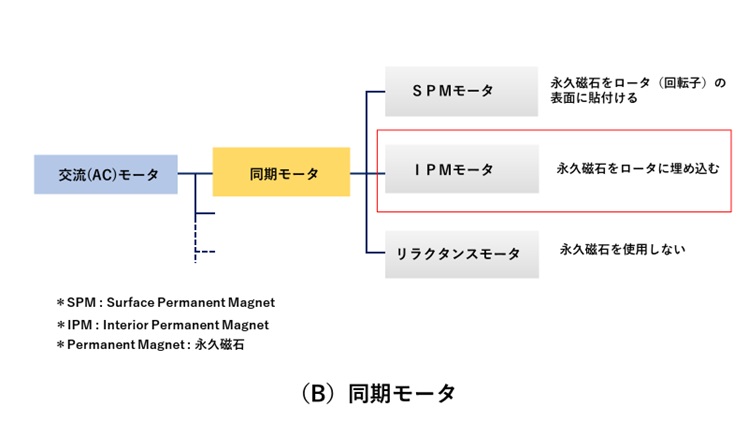
分類は、”永久磁石を使うか、使わないか” で分かれ、永久磁石を使う場合には、”永久磁石をロータの表面に貼り付けるか、埋め込むか” で分かれます。ハイブリッド車やEVで主に使用されているのが「IPMモータ」です。
[※関連記事:PMSM(永久磁石同期モータ)とは?原理・構造・特徴、EVに採用される理由を解説 ]
2.IPMモータ(3相交流同期モータ)の作動原理
IPMモータの中で、3相交流同期モータを取り上げ、その作動原理について説明をします。
以下図(C)に構造と作動原理を模式的に表しました。
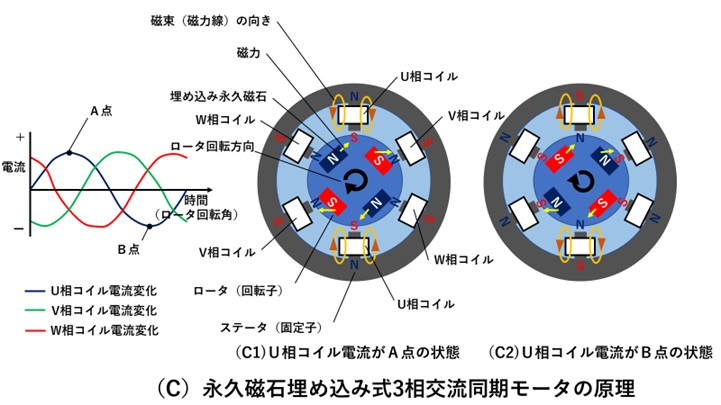
ステータ(固定子)にはコイルが巻かれ、ロータ(回転子)には永久磁石が埋め込まれています。
コイルは3種類(U相コイル、V相コイル、W相コイル)で、図のようにそれぞれ位相差をもって電流が流れます。コイルに電流が流れるとコイル部は電磁石になりますが、その極性(N極かS極か)は、電流の流れる向きによって変わります。(電流の向きにより、磁束、磁力線の向きが変わる)
ロータに埋め込まれた永久磁石のN極とS極の位置に応じて、すなわち回転位置に同期して、電磁石側の極性を変えることによって、ロータの永久磁石とステータの電磁石との間に発生する吸引力と反発力でロータを回します。
例えば図(C1)と図(C2)に、U相コイルに発生する電磁石の極性を示します。
電流の向きが異なるA点とB点で、電磁石の極性が変わる様子が理解できると思います。
三種類のコイルには位相の異なる交流電流が流れているため、A点では、U相コイル部とV相コイル部が吸引力で、W相コイル部が反発力でロータを回転させます。
3.車両用電気モータに用いる磁石の種類と特徴
永久磁石を用いるモータでは、用いられる磁石の特性が重要となりますが、現在車両用として主流となっているネオジム磁石(ネオジウム磁石)の特性について説明します。
以下図(D)は、代表的な3種類の磁石の特性を比較したものです。これにより、ネオジム磁石の特徴と課題が理解できます。
基準としているのは酸化鉄(Fe)を主成分とするフェライト磁石です。
アルニコ磁石は、鉄にアルミニウム(Al)、ニッケル(Ni)、コバルト(Co)などを加えた磁石です。
また、ネオジム磁石の主成分は、ネオジム(Nd)、鉄、ホウ素(B、ボロン)です。
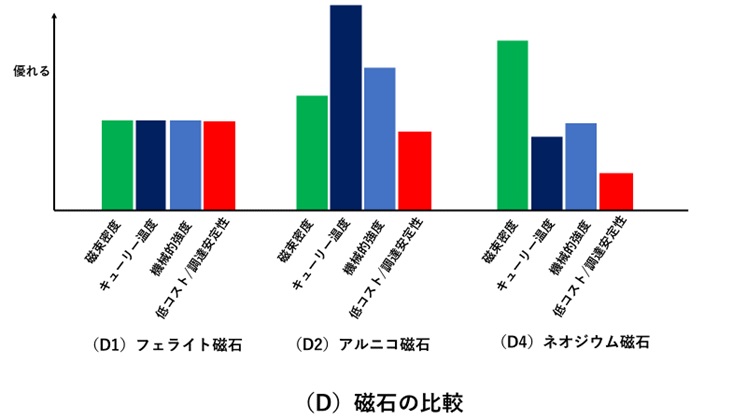
機械強度に関しては、アルニコ磁石、ネオジム磁石とも車両用モータに用いるための強度を有しています。
モータ出力を高めるうえで重要な磁束密度については、ネオジム磁石が最も優れています。一方で、アルニコ磁石に比べてキュリー温度(磁石としての性質が失われる温度)が低く、高温環境では減磁しやすいため、対策が必要となります。
例えば、ジスプロシウム(Dy)などを添加して高温時の保磁力を高め、熱減磁を抑える方法があります。また、冷却機構や制御により磁石温度の上昇を抑える工夫も必要です。
(※キュリー温度:フェライト磁石 約460℃、アルニコ磁石 約800℃、ネオジム磁石 約310℃)
車両適用に必要な低コストや調達安定性に関しては、ネオジムは生産地が限られた希土類(レアアース)ですので、効率の高いモータ構造にして使用量をなるべく少なくしなければなりません。高温時の保磁力を高めるために添加されるジスプロシウムも希土類元素であるため、その使用量を低減することが重要です。
4.電気モータを用いる車両駆動システム
次に、電気モータを用いる駆動システムの説明をします。
(1)駆動モータと発電機としての役割とHEVでの使い方
エンジンとモータの使い方の組み合わせは数多くありますが、その差が分かりやすいように、以下図(E)に整理・比較しました。
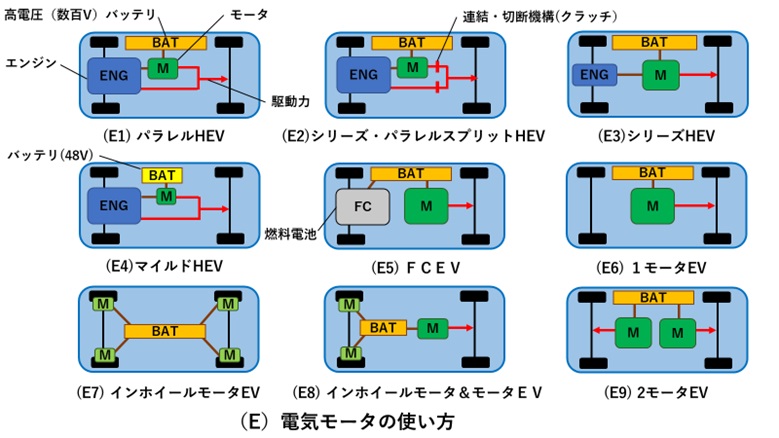
図(E)では、モータをMとして表してありますが、モータは駆動モータとしてだけでなく、発電機(ジェネレータ、generator)としての機能で用いることができます。
図のように駆動モータが駆動と発電の両方を行う場合と、発電専用のモータ(ジェネレータ)を別に独立して用いる場合があります。
単純に言えば、「パラレルHEV」はエンジンが主要駆動力でモータが補助駆動力、「シリーズHEV」はモータを主要駆動力とする考えです。
「シリーズ・パラレルHEV」は、走行条件に応じてエンジンの動力とモータの動力を使い分けたり、組み合わせたりする方式です。機械的な動力分割機構やクラッチ機構などにより、エンジン走行、モータ走行、両者の併用を実現します。
数百V級の高電圧バッテリを用いるHEVは「ストロングHEV」と呼ばれますが、これに対して、図(E4)に示すように48Vバッテリを用いるHEVを「マイルドHEV」と呼びます。
パラレルHEVに比べると、マイルドHEVではモータによる駆動はさらに補助的なものとなります。ただし、既存車両からの変更が比較的少なくて済むほか、減速時や惰性走行時のエネルギーを回生することで、燃費向上が期待できます。
シリーズHEVで、バッテリの充電量が低下した時にエンジンで発電を行い、モータ走行による航続可能距離を延ばす機能を「レンジエクステンダー」と呼びます。
(2)FCEVとインホイールモータを用いる駆動システム
図(E5)の燃料電池自動車(FCEV)では、燃料電池が発電を行います。燃料電池セル(fuel cell)では、水素と酸素を反応させることで電気を取り出します。
簡略的には、水の電気分解 2H2O → 2H2+O2 の逆反応である 2H2+O2 → 2H2O を利用して発電する仕組みです。発電した電力は駆動用モータに供給され、走行条件に応じてバッテリにも充電されます。
インホイールモータは、図(E7)や(E8)に示すように、全輪に用いる場合と、通常のモータと組み合わせて使う場合があります。図には表していませんが、駆動システムの構成としては、これらに変速機構、インバータ、コントローラなどが加わります。
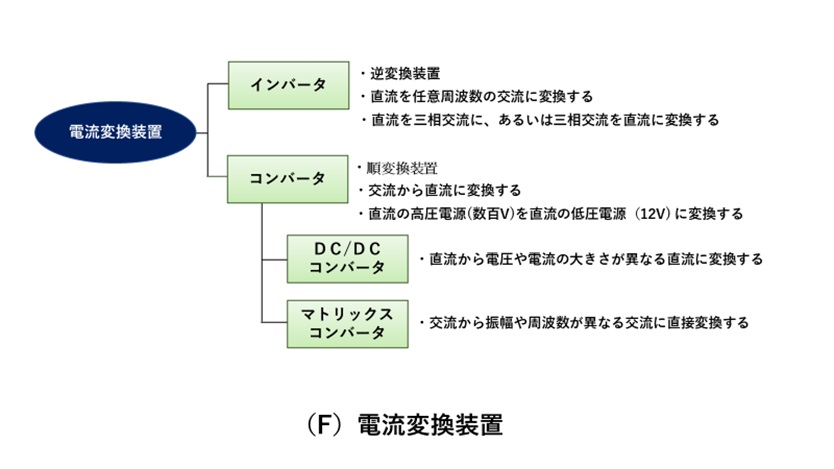
5.電流変換(インバータ・コンバータ)
ハイブリッド車や電気自動車では、高電圧バッテリから供給される直流電力を用います。モータを駆動する際には、インバータによって直流を三相交流に変換します。
一方、補機類やコントローラなどには12V系電源が用いられるため、高電圧から低電圧へ変換するDC-DCコンバータも必要になります。
[※関連記事:DC-DCコンバータとは何か?動作原理・役割・応用をわかりやすく解説 ]
電流変換装置(電力変換装置)の種類を図(F)にまとめました。
6.自動車におけるモータの制御
(1)駆動力配分とモータのトルク制御
ハイブリッド車では、まずエンジン駆動力とモータ駆動力の配分を制御しなければなりません。
発進や加速など高トルクが必要な時には、モータによる駆動割合を増やします。
また、排ガスの後処理の負担を低減するため、有害排ガス成分の発生が多いモードでもモータ運転の割合を多くします。
一方、SOC(State Of Charge)と呼ばれるバッテリ充電状況が低下した時や、モータ温度が過度に上昇する可能性がある時には、モータによる駆動割合を減らしエンジン駆動を増やしたり、エンジンによる発電機運転を増加させます。
各種センサにより運転状況と車両走行状態を検出し、ハイブリッド車でのモータへの配分目標トルク、または、電気自動車の目標トルクが決まった後はモータのトルクを目標値に制御します。
モータ回転とモータ駆動電圧に対する発生トルクの関係は図(G)のようになります。
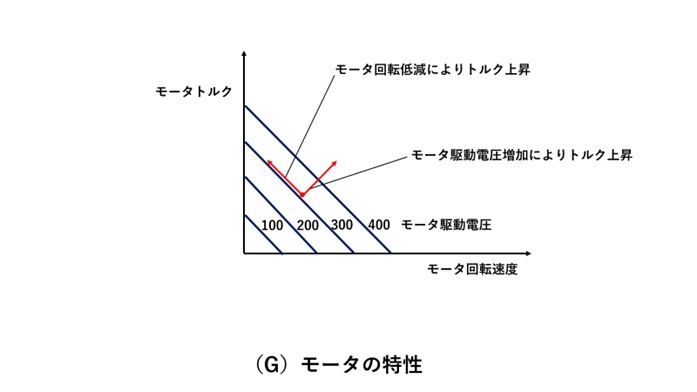
モータの発生トルクは、主にステータコイルに流す交流電流の大きさや位相によって制御されます。インバータは、バッテリから供給される直流電力を三相交流に変換するとともに、電流、電圧、周波数を適切に制御することで、目標トルクや目標回転数に応じたモータ駆動を行います。
また、モータ回転、すなわちロータの回転数を制御するためには、ロータの回転に同期するように三相交流の周波数や位相を制御する必要があります。そのためには、ロータの回転位置を検出し、その位置情報に基づいてインバータを制御することが重要となります。
(2)インホイールモータと回生ブレーキの制御
インホイールモータを用いる場合には駆動トルクの制御自由度が高くなり、車輪ごとの必要トルクや車輪スリップ状況に応じて、車輪ごとに駆動トルクを制御することもできます。
(通常のモータの場合には、左右輪のトルク配分機構が必要です)
一方、制動力(ブレーキ力)に関しては、モータを搭載する車両では、通常の油圧ブレーキに加えて、モータやジェネレータを発電機として作動させる際の負荷、すなわち抵抗力を制動力として利用することができます。これを「回生ブレーキ」と呼びます。
[※関連記事:回生ブレーキと廃熱回収の技術 ]
7.おわりに
今後の車両駆動システムでは、路面状況や走行状態に応じて、各輪の駆動力と制動力を独立かつ協調的に制御する技術がますます重要になります。
電気モータを活用した高精度な駆動・制動制御は、安全性、走行安定性、エネルギー効率を高めるうえで、電動車両の進化を支える重要な技術といえるでしょう。
(日本アイアール株式会社 特許調査部 H・N)