【自動車部品と制御を学ぶ】車両の姿勢制御(ESC,ESP,DSC)とは?必須前提知識と制御のポイントを解説

走行中の車両姿勢の不安定な挙動を抑制し、走行安全・安定性と快適性を得る車両走行の「姿勢制御」は、”ESC“(Electronic Stability Control)、”ESP“(Electronic Stability Program)、”DSC“(Dynamic Stability Control)など様々なシステムの略称で呼ばれています。
今回のコラムでは、車両走行姿勢制御の基本をやさしく説明したいと思います。
走行中の車両姿勢と挙動
車両姿勢において起こりえる車両挙動とその呼び名について、以下図(A)にまとめました。
各挙動について説明します。
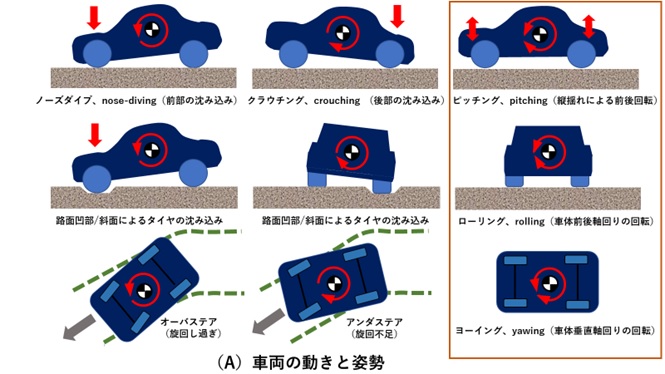
運転者による運転操作や、路面などの状況や横風などの外乱因子により、車両姿勢は影響を受けます。
運転者の急減速で車両前部が沈み込んだり、急加速で車両後部が沈み込みます。
この際には、車両の前部または後部に上下動が発生するとともに、図に示すように車両前後中心軸を中心とした回転運動(回転モーメント)が発生します。同様な挙動は、路面の凸凹や、うねりでも生じます。
路面の凸凹の影響が車両の左右輪で異なる場合には、車両左または右の上下動とともに、車両左右中心軸を中心とした回転モーメントが発生します。
次に車両の水平方向の挙動変化を見てみると、運転者の急ハンドル操作時やカーブを曲がる時などや、路面の傾斜や路面左右での滑りの違いなどにより、進みたい方向に対して異なる方向に車体がふられることがあります。この場合には、車体垂直軸を中心とした回転モーメントが発生します。
運転者の操舵に対して、旋回し過ぎの挙動を「オーバーステア」、旋回不足の挙動を「アンダステア」と呼びます。
上述した三つの軸回りの回転を、図(A)に示すように、それぞれピッチング(pitching)、ローリング(rolling)、ヨーイング(yawing)と呼びます。
車両に発生する力と力の方向
車両は慣性質量(マス)をもち、慣性運動を行いますが、これに対し、運転者の操作による駆動・制動や操舵、あるいは路面や横風などにより加速度が与えられ、車両の姿勢・挙動変化が起こります。
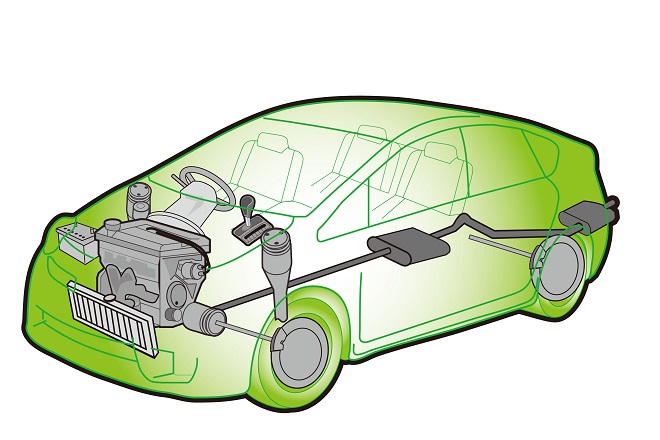
車両挙動により運転者が実際に感じる振動は図(B)に表すように、タイヤとサスペンション(バネと減衰装置)に支えられた車両部分の慣性質量の動きです。
このため振動の発生や変化には、バネ特性や減衰特性の設定や制御も影響を与えます。
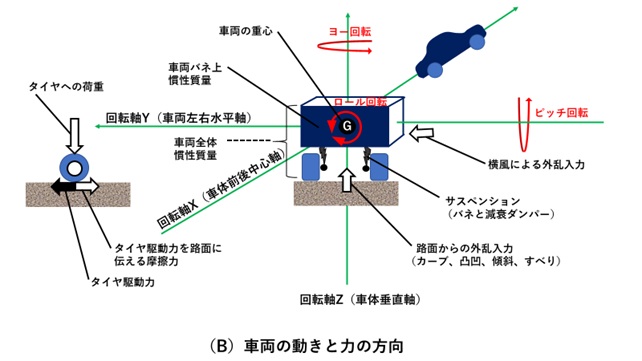
四つのタイヤのスリップ率の差は車両の水平方向の回転挙動(旋回挙動)にも影響を与えます。
スリップがあるタイヤは、タイヤ接地部においてタイヤ駆動力も摩擦力も小さくなり、前輪であれば、車体には、そのタイヤの内方向に曲がるモーメントが発生します。
一方車体の傾きや揺れにより、あるタイヤにかかる荷重が増加するとタイヤ摩擦力が増加しタイヤ駆動力が増すため、前輪であれば、そのタイヤの外方向に曲がるモーメントが発生します。
摩擦係数の低い路面で駆動や制動を行う場合には、駆動力が大き過ぎて車輪がスピン(空転)することも、制動力が大き過ぎて車輪がロックしてスリップすることも防ぐように駆動力と制動力の両方の制御が必要です。
ABS(アンチブロックブレーキシステム)は、制動時の車輪ロックを防ぎ、かつ制動効果を高めるための制動力制御を行います。
車両姿勢に関する検出情報と制御の考え方
車両姿勢制御における究極の目標は、車両が不適当な挙動を起こすことを予測して予防するような制御を行い、実際の不適当な挙動の発生時には更なる増大を防ぎ、振動などの挙動による影響を最短時間で収束させることです。操舵に関しては、操舵の修正操作を減らし、運転者の運転負担を低減することも必要です。
このためには、センサにより、挙動が起こる状態や挙動の初動(発生始め)を検出しなければなりません。
ヨーイング(車体旋回運動)の角加速度を検出するセンサは、「ヨーレートセンサ」あるいは「ジャイロスコープ」とも呼ばれています。
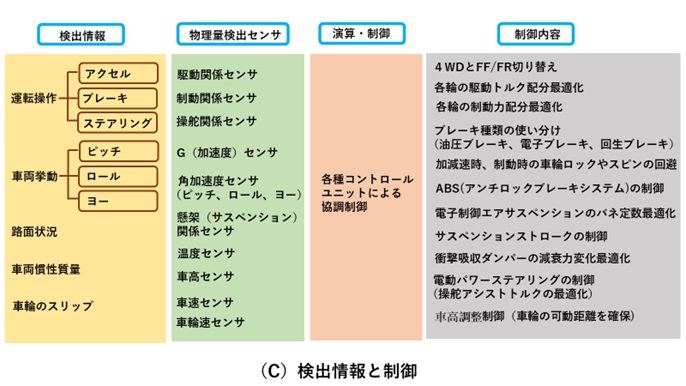
検出結果に対応する制御は、「走る」「止まる」「曲がる」に関係する駆動系、制動系、操舵系の3制御に加えて、車体振動に影響をもつ懸架系(サスペンション)の制御になります。
コントロールユニットとしては、一つのユニットに統合する場合と分散したままのユニットで制御する場合がありますが、いずれの場合でも各制御の協調を行いながら、制御モデルを用いたフィードフォワード制御や、PID制御などのフィードバック制御を行わなければなりません。
以下図(C)は、ある車両の事例を示したものではなく、走行車両姿勢制御の技術を、検出情報と制御の点からまとめたものです。
実際の適用では、コストを低減したり、フェイルセーフシステム(装置あるいはシステムが故障した場合に、安全サイドに作動を移行させるシステム)などの複雑化を避けるために、よりシンプルな構成を目指します。
運転支援と制御のリスクへの対応
安全性や安定性に関する運転支援効果が大きい場合というのは、別の言い方をすれば、図(D)に表すように、運転支援が無ければ危険度が高い状態であるということになります。
例えば凍結などで、路面の左右で滑り方(路面摩擦係数)の異なる、いわゆるスプリットミューの路面を運転支援により無事走行できている場合には、運転支援が無ければ危険な状態に陥いる可能性があります。
運転支援には二種類のリスクがあります。
一つは故障により支援なし状態となること、もう一つは運転支援限界を越えて支援なし状態となることです。
故障のリスクに関しては、フェイルセーフシステムの設計により、故障時にも、以下図(D)の(a)のように一気に危険状態へと変化することを防がなければなりません。
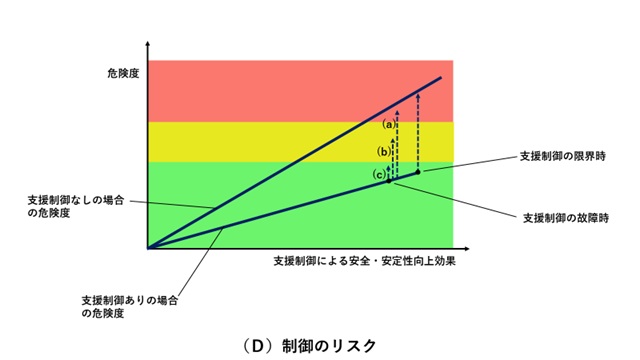
一方、支援制御の限界を越えるリスクへの対応に関しては、運転支援制御による危険回避依存度が高くなった時には、運転者にその状態を認識させ、限界を越えさせないようにすることも重要です。
例えば、システムとして認識できる、制御なしの場合の危険度が、あるレベルを越えた時点から、[視覚表示→音声報知→ハンドル振動(触覚報知)]などのように、段階的に強い警告を行い、運転者の注意認識と運転操作の緩和を促すという対応があります。
(日本アイアール株式会社 特許調査部 H・N)
◆併せて読みたいお奨めコラム