センサのコンセプト開発における着眼点と重要ポイント

開発には、改良開発の場合と、コンセプトから検討して開発する場合とがあります。
本コラムでは、センサのコンセプト開発におけるポイントを説明してみたいと思います。加えて、システムとセンサを同時に開発する場合のように、適用するセンサを選択するためのポイントも説明します。
目次
1.検出ターゲットとする変化量とセンサで検出する変化量
遠心力式調速機のように、回転速度を遠心力として検出して、その遠心力でアクチェータ(作動装置)を動かすというようなメカニズムもありますが、多くの機構やシステムでは、センサとアクチェータとの間に制御のためのコントローラ(電子制御ユニット、コントロールユニット)を持ち、センサの出力は最終的に電気信号としてコントローラに入力されます。
実際に適用されている多くのセンサでは、システムにおいて検出ターゲットとする変化量に対して、その変化量に連動して変化する変化量を様々な方式でとらえ、それを最終的に電気信号とします。
センサのコンセプトを検討したり、システムにおける検出の多重化を考える場合には、図1のように、検出ターゲットと連動して変化するものを分析し、どの変化量を検出できるか、あるいは既存のセンサやシステムでは、どの段階の変化量を検出しているのかを分析してみることが役立ちます。
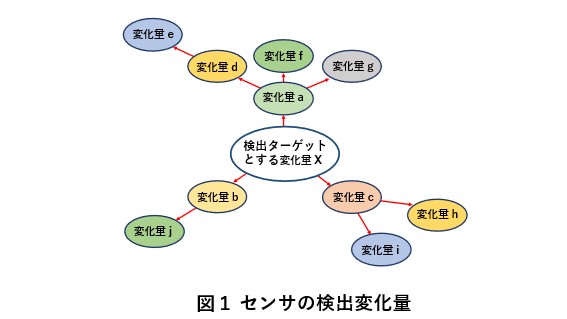
「変化と連動するもの」には、装置の回転が変化しているときに、同時に温度や圧力が連動して変化しているというように、実際に連動して変化しているものもあれば、変化するものから意図的に他の変化量に転換するものもあります。
例えば、圧力センサでは、圧力変化を圧力に連動した薄膜の変形に変換し、薄膜に配置したブリッジ回路に流れる電流の変化で、圧力を検出します。
モーションセンサや位置センサでは、動きや位置の変化を電場や磁場の変化に変換したり、遮蔽物や透過物と連動させ光の透過量に変換するなど、様々な検出方式が存在します。
センサのコンセプト設計における検出方式の選択では、“使える”検出原理からのアプローチと、“使いたい”検出原理あるいは検出素子からのアプローチという二通りがあります。
どこまでをセンサ素子と呼ぶかということはありますが、変化量を電気的変化(電気信号)に変換するセンサ素子の例としていくつかの例を挙げます。
- ピエゾ素子: 受圧力
- ゼーベック素子: 熱
- ホール素子: 発生ホール効果
- フォトダイオード: 受光量
- マイクロフォン: 音
- 電磁コイル、磁気抵抗素子(MR素子): 磁界変化
- 触媒: 化学変化(イオン化による電子移動の生成)
2.必要な検出機能・性能および信頼性の目標数値化
センサにどのような検出原理が適用可能で、どのようなものなるのかを検討するため、分かる範囲で目標を数値化することが必要です。
その時点で数値化できない項目を明確化したり、どうやって決めていくのかを検討することも役に立ちます。
センサにおいて目標値を決める典型的な項目としては、以下のような項目があります。
候補のコンセプトに対して、概略の目標値とポテンシャルを、これらの項目に対して比較します。
比較対象は、ベンチマークとなる既存のセンサや競合他社のセンサとすることもできます。
- 検出精度
- 分解能
- 応答性
- S/N比[信号/ノイズ比]
- 動作条件
(※出力特性の温度依存性によるヒータの必要性有無など) - 消費電力
- 機械的強度
- 耐環境ロバスト性[頑健性]
(※熱、水分、化学成分、振動、電磁ノイズなど、触媒を用いる場合には、被毒環境要素も含む) - 搭載性
- 劣化寿命
- コスト
3.変化率検出方法のバリエーション
これまで検出ターゲット変化量を電気変化に変換する場合について述べてきましたが、変化量ではなく”変化率”、あるいは”変化速度”を検出したい場合には、図2に示すように、変化率を電流などの電気量の変化勾配、すなわち変化量の微分値として検出する方法や、変化率により電気的変化量が設定した閾値を越える時間が変わることを利用して検出する方法があります。(時間を基準に検出・判定を行う)

変化率だけでなく、センサで得た電気信号を一次情報としたとき、一次情報の二次処理、三次処理で別の情報を得ることができます。
信号処理をどこまでセンサで行って、どこからコントローラで行うのかは、次に説明するセンサのインテリジェント化レベルの設定の話とも関係します。
4.センサのインテリジェント化レベル
システムにおいて、センサの出力はシステムのコントローラ(制御装置、コントロールユニット)に入力され、システムの制御や故障診断などに用いられますが、センサのコンセプト開発では、センサのインテリジェント化(スマート化)のレベルを検討・設定しなければなりません。
図3は、インテリジェント化レベルの例を三段階で示しています。
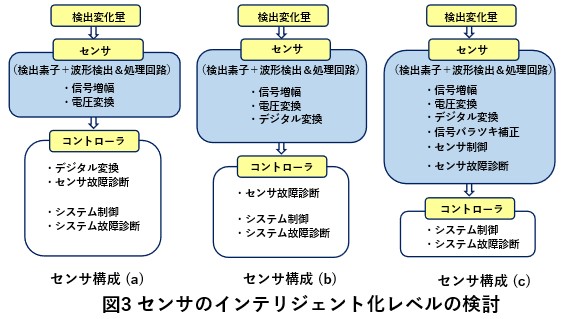
センサ構成(a)では、センサからの出力はアナログ信号で、コントローラでデジタル信号に変換されます。
センサ構成(b)は、デジタル変換をセンサ側で行い、コントローラへはデジタル信号として出力されます。コントローラのアナログ入力やA/D変換負荷を減らすとともに、センサとコントローラを結ぶワイヤハーネス(電線)において、電気信号が外部からの電磁ノイズの影響を受けにくくできます。
センサ構成(C)は、さらにセンサのインテリジェント化を進めた例で、センサにマイコンを持ちます。これにより、センサの個体バラツキや劣化などの補正をセンサで行ったり、センサに内蔵したヒータを制御し検出に最適な温度とすることが可能となります。システムでは、システムとしてセンサも含めた故障診断をしなければなりませんが、センサにマイコンを持つ場合には、センサ故障の診断をセンサ自身で行うことができます。
5.センサの融合(センサフュージョン)
検出ターゲットが複雑な場合には、検出ターゲットを構成する特性に応じて、複数のセンサを用いて検出を行うという考えもあります。
複数のセンサの融合による検出を「センサフュージョン」(sensor fusion)と呼びます。
例えば、車両の自動運転でターゲット検出変化量が障害物の形状、位置そして動きである場合に、LiDAR(*1)単独で複数の点の位置・動きを検出し障害物の三次元データとして認識する場合もあれば、LiDARと赤外線カメラを合わせて障害物認識を行う場合があります。
単独のセンサの能力目標をどの程度に設定するのかという検討のためには、センサの適用を想定しているシステムの技術動向と市場動向を知っておかなければなりません。
(*1)LiDAR(ライダー, Light Detection and Ranging):レーザー光を用い物体の位置・方向および距離を検出するセンサ
6.システムにおけるフェイルセーフ
システムにおいては、システムの制御レベルや目標システムコスト、そしてロバスト性(頑健性)を考えシステムを設計します。
センサは、熱、振動、電磁ノイズなどで故障や誤作動を起こす可能性が有ります。フェイルセーフ(*2)あるいはフォルトトレランス(*3)を考慮し、センサを多重化する場合には、搭載(設置)環境の異なるところに、別の原理のセンサを用いることによりロバスト性が向上します。
逆に言えば、同じような外乱環境で、同じような原理あるいは同一の変化量から発しているような変化量を検出するセンサで多重化してもロバスト性は向上できません。
(*2)フェイルセーフ(fail safe):システムの故障時に安全サイドに制御を切り替える制御
(*3)フォルトトレランス(fault tolerance):システムの故障時にも、できる限り機能維持を行う制御
7.センサの技術要素の分解・評価
センサのコンセプト案がいくつかできたら、図4に示すように技術要素の分解を行います。
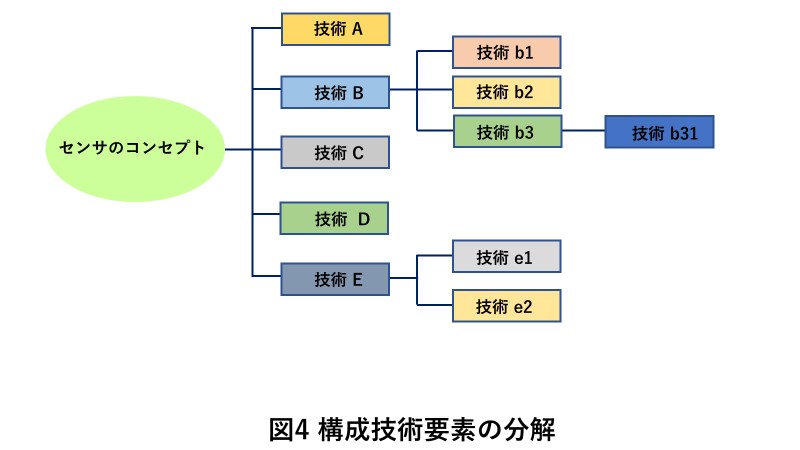
次に図5に示すように、各技術の評価を行います。

必要とする対応技術要素に関して、新規開発対応が必要な技術要素や、ブレークスルーを含めた新規開発が必要な技術要素などを分類整理、見える化することにより、どのような開発能力やリソース(工数、開発費、評価設備)が必要か、目標とするプロジェクトや市場投入に間に合うかなどを推定する精度を上げることができます。
また、コンセプト開発段階では、技術構成を選択・組み合わせできるので、将来のことを考え、どの技術分野を強化していきたいかということを反映できます。開発活動は、固有技術と人材の両方を育てます。
8.先行技術、競合他社の状況の把握
センサのコンセプトが出来上がり、必要な基礎検討や基礎評価の後、製品化開発段階に移行し、各開発の節目に応じてDR(デザインレビュー)が行われます。DRの実施項目の一つとして、パテントレビューも行われます。
パテントレビューでは、他社権利侵害などの特許上の問題はないか、あるいは開発の経過で考案された技術がしっかり権利化されているのかをレビューします。
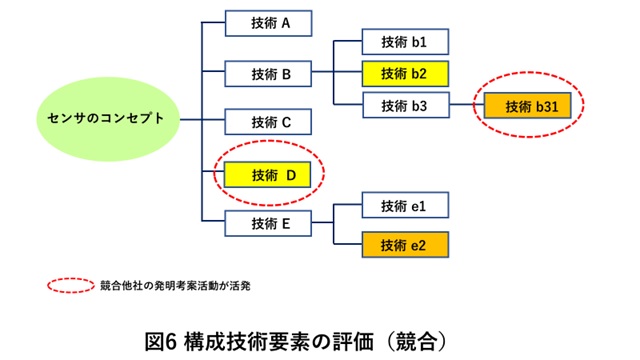
コンセプト設計の段階でも先行技術、競合他社の状況を特許情報により調査しておくことは重要です。
図6に示すように、コンセプト設計の分析で構成要素とされた技術分野で競合他社の発明考案活動が活発な場合には、その内容に応じて、注意をしたり、開発の方向性・方策を変更したり、あるいは自社の権利化網を広げるなどの対応が必要となります。
製品化開発の段階に移った後は、技術構成に応じて、DRBFM(*4)などが行われ、評価計画などが立案されます。そのため、製品化開発の後期で特許的な問題が認識されると、仕様変更に対応する評価時間が不足し、品質上のリスク、あるいは目標とする量産開始時期の変更を余儀なくされるリスクが生じます。
(*4)DRBFM(Design Review based on Failure Mode):変更点、変化点に関係する機能と可能性のある故障モードを考えデザインレビューを行い、それに基づき設計検証と評価を行う手法
(日本アイアール株式会社 特許調査部 H・N)
☆各種センサ技術に関する特許調査・技術情報調査は日本アイアールまでお気軽にお問い合わせください。