自動運転車の技術ニーズと発展性を考える

将来製品やシステムを考える場合には、世の中のニーズの動向に加え、適用できる技術の開発進捗動向を考慮する必要があります。今回のコラムでは、開発課題がクリアできるタイミングはさておき、ブレインストーミング的に発想を膨らませて、自動運転車技術の発展性について考えてみたいと思います。
1.現在の自動運転車の定義と先進車におけるニーズ
まずは「自動運転車とは何か?」という定義について、おさらいをしてみましょう。
車両の機能レベルの分類として0から5まで図1のように定義されており、自動運転車はレベル3から5です。
各レベルを達成するため、様々な技術要素、あるいはシステムが開発されています。
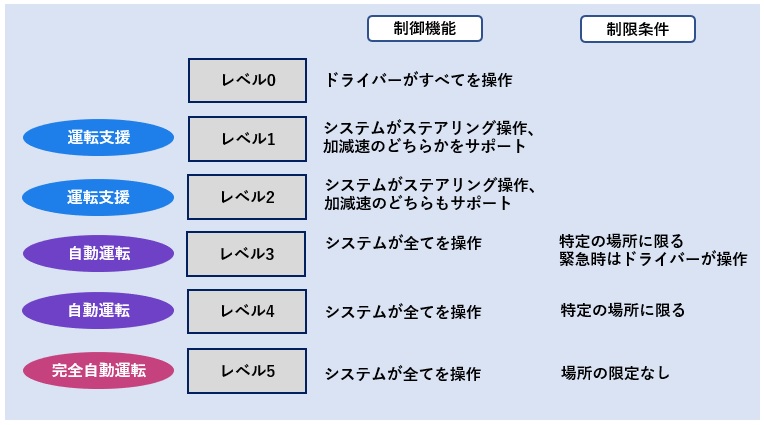
【図1 自動運転のレベル】
一方で、自動運転は、車に対する様々なニーズに対する解決策の一つに過ぎません。
車全体に対するニーズをまとめると図2のようになります。
自動運転レベル3~5を用いるような先進車両では、車両トータルでのレベルアップが求められます。
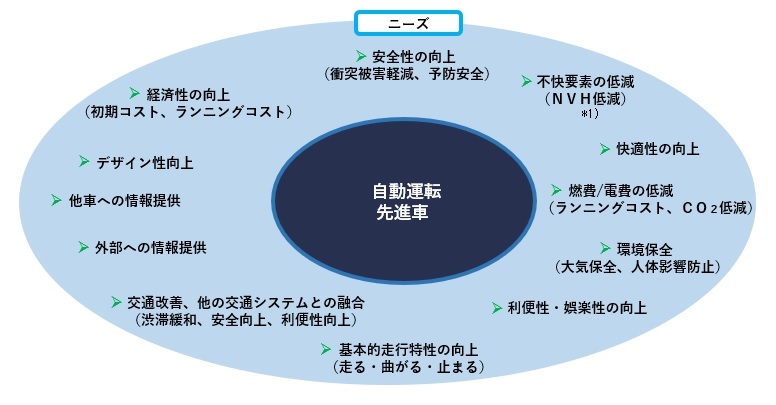
【図2 自動運転先進車におけるニーズ】
一方で、マイクロコミュター*2)のような自動運転車では、ある技術領域では最先端技術を適用しながらも、別の領域での機能をカットするというような、メリハリを付けた構成・システムにするというような戦略もあるかもしれません。
*1) NVH: Noise, Vibration, Harshness(騒音、振動、不快感)
*2) マイクロコミュター: 少人数乗車・短距離移動に特化した超小型(電気)自動車
2.自動運転車システム技術の活用
自動運転車のような新技術を導入する場合には、付加価値も上がりますが、同時にシステムコストも上がります。開発費回収分も含めてユーザーに求める車両のプライスが上がることになります。
このような状況に対しては、図3のような考え方でコストパフォーマンスをより高めることが有効です。
すなわち、開発成果による付加価値の創造に加え、それらの成果を組合わせて追加の付加価値を生むことにより、全体コストパフォーマンスの向上を図ることができます。
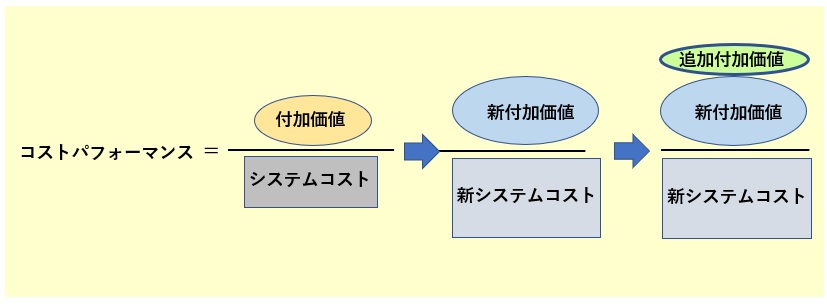
【図3 コストパフォーマンスの向上】
さらに次のように、開発成果を別のシステムに適用していくことにより、新しい技術領域を発展させることができます。
- ① 技術要素の組合わせによる自動運転車システムにおける新たな付加価値の創造
- ② 車両以外の他のシステムへの応用/適用
- ③ 車両以外の他のシステムの技術要素と融合させた新しいシステム
①の例として挙げると、自動運転の技術要素としてLiDAR*3)やカメラを用いて、環境認識や衝突防止行いますが、これらセンサで検出・分析した情報と車載照明を組み合わせ、歩行者へのディスプレイやコミュニケーションが可能になります。
②や③の例では、列車、船舶、ドローンなど、他のモビリティへの自動運転技術の適用は当然ですが、自動運転を含む先進車システムを構成する技術を検討すると、モビリティ以外への応用・適用のアイデアが出てくると思います。例えば、乗員の状態や動きの検知や対応制御は、セキュリティ分野やVRゲームへの応用が可能です。
図4に示すように、ニーズ(needs)に対応して開発した成果は、新たなシーズ(seeds、種)と考え、何に使えるかを考えていくことにより、新たな領域で価値を生むものへと成長させることができます。
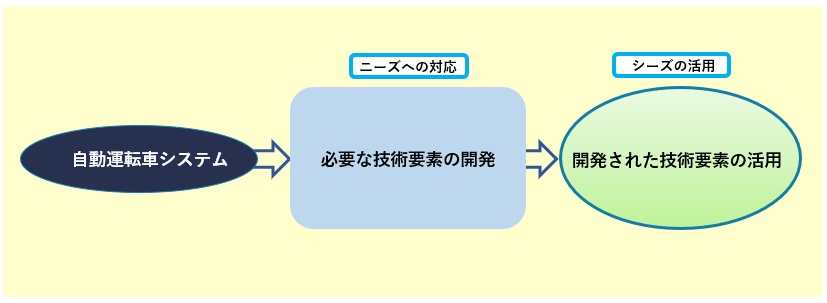
【図4 自動運転車におけるニーズとシーズ】
*3) LiDAR: Light Detection And Ranging、光を用いた検出と測距
3.Mobile room(モバイルルーム)
自動運転車は「モバイルルーム」すなわち移動する空間という機能を実現することになります。
「・・ルーム」に活用できるというと、いろいろな発想が浮かぶと思います。
動くリビングルーム、動くオフィス、動く娯楽室、動く検査室、動く・・・室など。
この場合には、動くことのメリットの利用と、デメリットへの対応技術を考えなければなりません。
動くことのメリットは、「移動時間を使って・・ができる」が基本だと思います。
一方、デメリットは、「動いているので、・・がしずらい」となりますね。
例えば、「車酔いしてしまうので、文字を読むことができない」というデメリットに対しては、車両姿勢制御や振動低減技術の高度化が求められます。
「シートをマッサージチェアにして、移動中にマッサージ」というようにアイデアも広がっていきますが、注意しなければいけないのは、航続距離や電費を考え、消費電力の大幅増加を抑えることのできるシステムを考えなければいけないことです。
4.CPS制御やデジタルツイン制御との組み合わせ
CPS(Cyber-Physical System)制御では、実際の状態を各種センサで収集した大量の情報を用いて、サイバー空間、すなわちバーチャルワールドでモデル化やシミュレーションを行い、リアルワールドを制御します。
これを自動運転制御に適用すると、CPS制御の対象が車や乗員で、周辺環境が車内環境や車外の道路状況や歩行者と考えることができます。自動運転の試行(制御トライアル)をVRで行い、効果・影響をとらえて実際の制御に反映できます。
[※関連コラム:そうだったんだ技術者用語 VR、MRそしてCPS はこちら]
さらに、デジタルツイン制御では、図5に示すように、バーチャル空間で制御対象と双子のようなバーチャルモデル、すなわちデジタルツインを作って、実際の制御対象を目標制御状態にできるよう制御を行います。
外部情報の取り込みのほか、AIを用いて、過去データの学習だけでなく未来推定も可能になります。
ただし、目標制御精度に応じた通信速度・容量や同時接続数の向上が必要になります。
[※関連コラム:【センサのお話】バーチャルセンサとデジタルツイン はこちら]
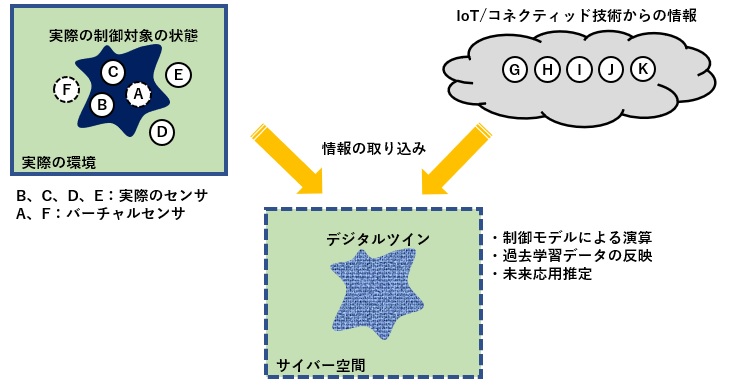
【図5 デジタルツイン制御】
制御対象が乗員であり、乗員のデジタルツインを作って制御するとしたら、制御対象からの検出情報は身体状況以外にも、画像解析などを用いて喜怒哀楽など精神状況も含めることができます。
5.セーフティとセキュリティ
自動運転車において、セーフティ(安全性)技術が重要なのは言うまでもありませんが、セキュリティ(保安性、防犯性)に関する技術ノウハウも同様に重要です。
[※関連コラム:自動運転車のセーフティとセキュリティ(安全性と保安性の設計を考える) はこちら]
ドライブバイワイヤ技術*4)やリモートコントロール技術を進めていくには、システムのハッキングに対する防備も強化しなければなりません。誘拐、乗員への危害、車両を用いたテロなどのリスクを回避しなければなりません。自動運転車の開発におけるセキュルティ技術の成果は、他の自動運転モビリティにも活用可能です。
*4) ドライブバイワイヤ(drive by wire): メカニカルなリンク機構で使うようなワイヤケーブルを用いずに、センサからの電気信号を用いて駆動を制御するもの(電線を用いて制御)。「x by wire」(エックスバイワイヤ)という場合には、xが制御対象(操舵、制動など)。
[※関連コラム:【自動車部品と制御を学ぶ】バイワイヤ(x by wire)とは? はこちら]
6.自動運転車の発展性
図6は自動運転車の発展性について考えたものをまとめたものです。
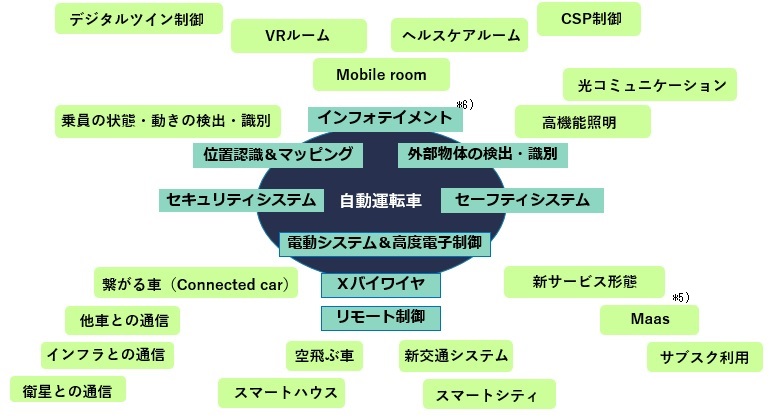
【図6 自動運転車のシステムの広がり】
*5) Maas: Mobility as a Service、車を所有せずに、使いたい時、料金を払って利用するサービス。例えばカーシェアリング
*6) インフォテイメント: インフォメーションとエンターテインメント
本コラムの内容をヒントに新たな可能性と、それに関係する課題を考えてみてはいかがでしょうか。
(日本アイアール株式会社 特許調査部 H・N)