【自動車部品と制御を学ぶ】バイワイヤ(x by wire)とは?技術概要と制御のポイントがこれでわかる
車両技術において「バイワイヤ技術」(x by wire、エックスバイワイヤ)と呼ばれているものがあります。
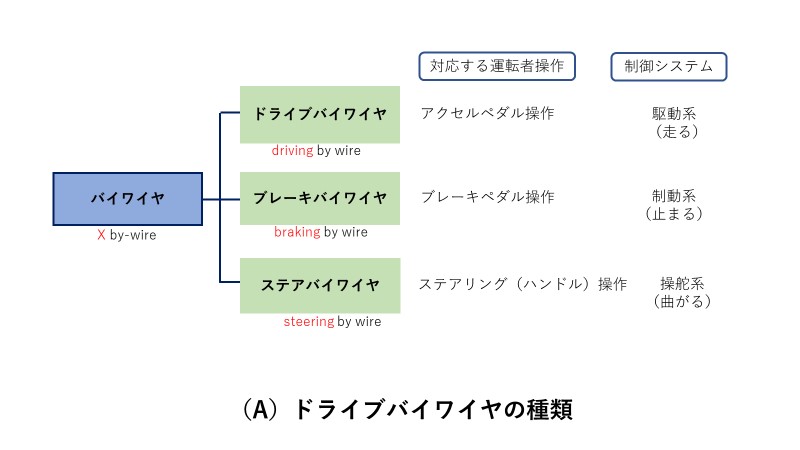
例えば、ドライブバイワイヤ(driving by wire)、ブレーキバイワイヤ(braking by wire)、そしてステアバイワイヤ(steering by wire)です。
以下図(A)に三つのバイワイヤ技術をまとめました。ドライブバイワイヤは駆動系(走る)の制御、ブレーキバイワイヤは制動系(止まる)の制御、そしてステアバイワイヤは操舵系(曲がる)の制御を行います。
デバイスやシステムの呼称においては、油圧や電動の補助力を用いるものをパワー〇〇(パワーステアリグ、パワーウィンドウ、パワーシート、パワースーツ)などと呼ぶように、特徴的な単語のみ用いて略語を作る場合がよくあります。
今回のコラムで説明する、〇〇バイワイヤという技術の呼称について、実際にはどのような特徴があるのかを説明します。
“x by wire” バイワイヤとは?
xを説明する前にまず”by wire”の説明をします。
“wire”は、”electric wire”すなわち「電線」を意味し、メカニカルなリンク機構で使うようなワイヤ・ケーブルを意味しません。
“x by wire”の”x”は、図(A)に示すように、センサからの電気信号を用いて制御されるものを変数xとして表しています。
今回取り上げた三つのバイワイヤ技術以外では、バイワイヤ技術の語源でもある航空機のフライバイワイヤ(fly by wire)や、トランスミッションのシフトバイワイヤ(shift by wire)などがあります。
ドライブバイワイヤの例で言えば、制御するのは車両の加減速すなわち車両駆動力です。
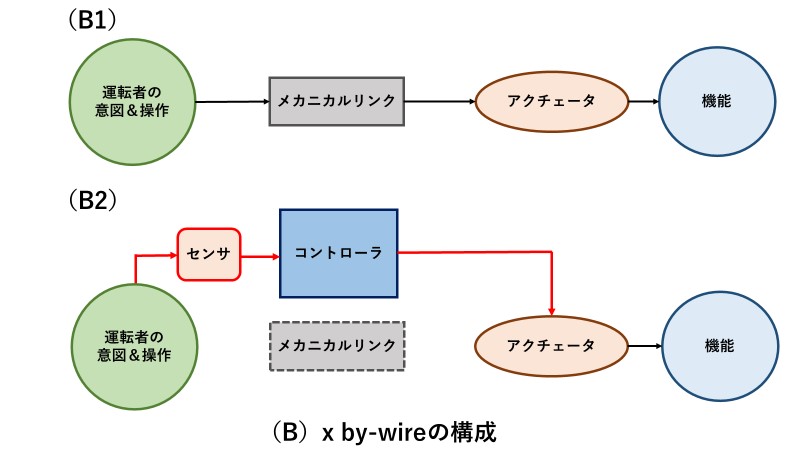
ドライブバイワイヤでない場合の制御の流れは図(B1)に表すように、ドライバがアクセルぺダルを操作し、アクセルペダルに連結されたリンク機構によりアクチェータ(作動装置)が動かされます。
一方、ドライブバイワイヤでは、ドライバとアクチェータを物理的に連結するリンク機構は有りません。
図(B2)に示すように、アクセルペダルセンサによりドライバの加減速の意図を検出し、コントローラが最適な駆動力変化パターンの目標を決め、それを実現するようにアクチェータを動かします。
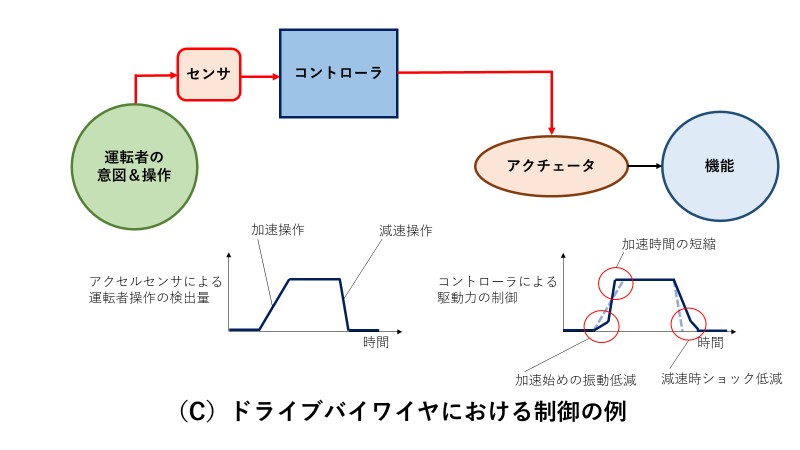
以下図(C)を使って、バイワイヤの制御を、もう少し具体的に詳しく説明します。
センサにより検出するドライバのアクセルペダル踏み込みの変化が、図(C)左のグラフのような場合に、それをそのまま駆動力制御に反映するのではなく、右のグラフのように変更を加えます。
加速の直後の振動や減速時の振動を低減するために駆動力変化を緩やかにしたり、加速の途中からは加速性をよくするため駆動力変化の速度を上げます。すなわち、コントローラでは、アクセルパダルセンサからドライバの意図を検出しますが、それ以外の要素も加えて、制御目標値を決めます。
加減速における振動抑制や加速性向上の例を挙げましたが、それ以外にも加速時に発生する有害排出ガスを低減したり、燃費(電費)の向上のためにも目標変化パターンを変えます。
最終的には、ドライバのアクセルペダル操作により影響を受ける車両の状態を最善化するように駆動力の制御を行います。
同様に、「ブレーキバイワイヤ」では、ブレーキペダル操作により影響を受ける車両の状態を最善化するように制動力の制御を行います。
ブレーキバイワイヤで制御する制動力は負の駆動力(駆動力に抵抗する力)です。
滑りやすい路面において駆動力や制動力の加減でスリップを防止するためにはブレーキバイワイヤ制御とドライブバイワイヤ制御との協調制御が必要になります。
「ステアバイワイヤ」では、ステアリング操作により影響を受ける車両の状態を最善化するように操舵力の制御を行います。
舵を切るという基本的な制御に加え、路面状態やカーブの形状に対応して、曲がり不足や曲がり過ぎを回避してスムーズな旋回を実現するように、車体の動き全体を考慮した制御が必要となります。
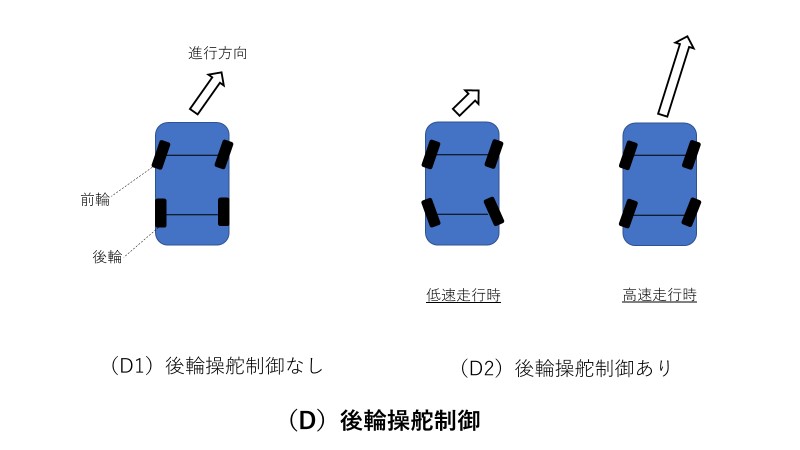
‘車両の操舵’という場合、通常、前輪の向きを変えることを考えると思いますが、以下図(D)で示すように、同時に後輪の向きを変えるものもあります。
運転状況により、ドライバの意図に最適な車両の動かし方を考え、例えば低速でより小回りを利かせたい場合には図(D2)左のように後輪を前輪と逆位相(逆向き)に動かし、一方、高速道路での車線変更のような場合には、図(D2)右のように後輪を前輪と同一位相(同じ向き)に動かします。
バイワイヤシステムにおけるフェイルセーフ
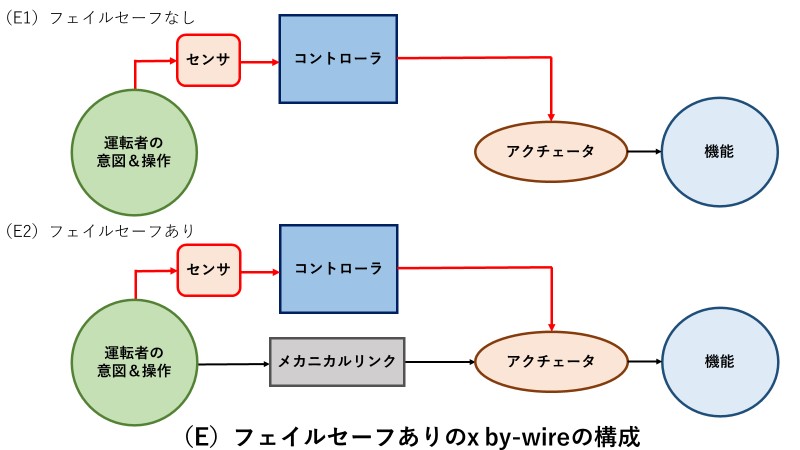
バイワイヤシステムでは、以下図(E1)に示すようにメカニカルリンクがなくなりますが、フェイルセーフ(fail safe, 故障時は、システムを安全サイドに制御する)のために、図(E)のようにメカニカルリンクをバックアップ制御用として残し、故障時に切り替えを行うものもあります。
バイワイヤシステムでは、機械的構造としては全体構造をコンパクトでシンプルにできるというメリットがありますが、一方、高度化された制御のシステム安全性・信頼性の確保のために、複雑さを追加しなければならない場合もあります。
バイワイヤ技術の先には?
ドライブバイワイヤ、ブレーキバイワイヤ、そしてステアバイワイヤでは、ドライバの‘走る・止まる・曲がる’に関する意図を、アクセルペダルセンサ、ブレーキペダルセンサ、そしてステアリングセンサで検出して、
快適性、安全性、そして環境への優しさも含めた制御を行います。
この場合の‘意図’を考えると、運転を楽しみたい(fun to drive)という場合を除けば、‘走る・止まる・曲がる’は手段であって、その元々の意図はA点からB点への移動を、‘快適、安全、環境に優しく行う’ことです。
この考え方を進めていくと「自動運転」にたどり着きます。
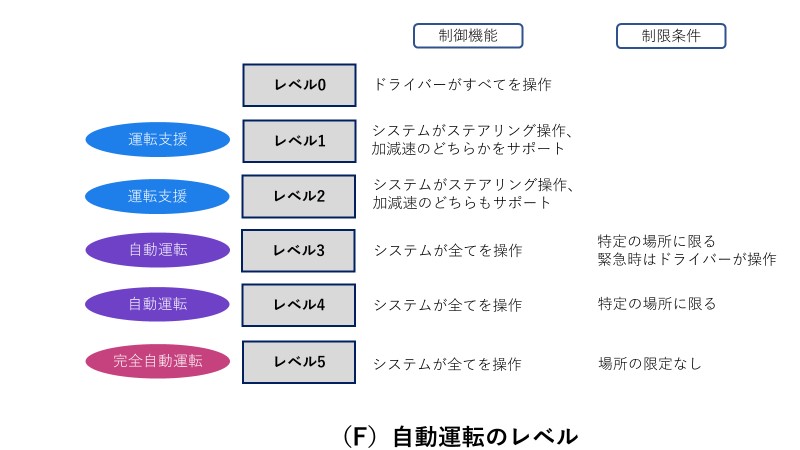
自動運転技術でも車両の電子制御技術がベースになり、以下図(F)の自動運転レベルの説明で示すように、バイワイヤ技術の延長発展技術であることが分かります。
‘ステアリング操作のサポート’はドライブバイステア技術の延長発展、‘加減速のサポート’は‘ドライブバイワイヤ技術とブレーキバイワイヤ技術の延長発展です。
現在、自動運転関連技術は、自動駐車、高速道路での車間距離一定・前車自動追従、あるいは高速道路での自動車線変更・追い越しなどを手始めに導入が進んでいます。
自動駐車でも既にアクセル、ブレーキ、そしてステアリングの操作は、コントローラがサポートもしくは完全制御しています。
これからのステップで言えば、緊急時のドライバの関与を不要にし、駐車という特定のシーンや高速道路という特定の場所という限定から出るステップ、すなわちレベル5に進むために、システム安全信頼性評価を含むさらなる熟成開発を行わなければなりません。
(日本アイアール株式会社 特許調査部 H・N)