【センサのお話】バーチャルセンサとデジタルツイン

センサにはいろいろな原理や方式がありますが、そもそもの基本は実際の知りたい変化と相関を持つ変化を電気的変化などにより知ることです。
モデル制御においては、アクチェータ(作動装置)の動きや、アクチェータにより制御される対象がモデル化されます。これに加えて、センサについても実際のセンサを使わずに仮想センサを用いてモデル化するのが「バーチャルセンサ」の考えです。
今回のコラムでは、バーチャルセンサとこれを含むデジタルツインという考えについて説明します。
※「デジタルツイン」(仮想のふたご)は、DARPA(アメリカ国防高等研究計画局)による造語です。
目次
1.センサによる数値化と仮想の数値化
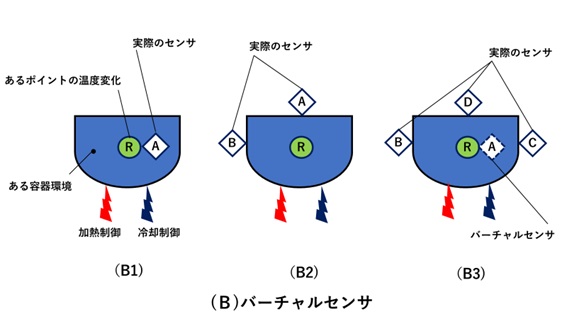
センサでは、図(A1)のように、実際の変化(R)を、それと相関を持つ出力変化(A)として検出します。
例えば温度変化を知りたいときに、サーミスタを用いて、温度変化とともに変化する電気抵抗の変化で温度を検出します。
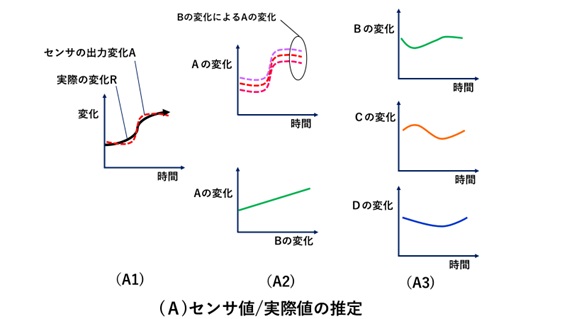
変化を知りたいポイントにセンサを設置できない場合には、図(A2)のように、別のポイントにセンサを設置し、このポイントの変化(B)と変化(A)の相関を用いて、変化(A)を検出します。
温度検出の例で言えば、温度センサが検出したいポイントに設置できない場合には、別のポイントに設置して、温度分布や温度相関を用いて知りたいポイントの温度を知ります。
この場合、変化(B)は温度に限りません。例えばあるポイントの温度膨張による圧力変化と知りたいポイントの温度とが相関があれば、圧力センサにより、知りたいポイントの温度変化を検知することができます。
この考えをさらに進めていくと、図(A3)のように、変化(A)とは別の変化である(B)(C)(D)を知ることにより、変化(A)を知るという考えが理解できると思います。
このように、実際の他のセンサや他の情報を用いて、あたかもそこにセンサがあるかのようにして変化を検知するのがバーチャルセンサ(仮想センサ)です。
2.バーチャルセンサの考え方とメリット
モデル制御では、制御対象やその環境などの変化を、数値化してシミュレーションのように変化を推定していきますので、バーチャルセンサによって検出した変化値(A)は、シミュレーション計算の過程で登場する変数のようなものだと考えることができます。
制御変数Xが関数 X=f(A、L,M)で表されるとき、入力として必要な変化(A)を関数 A=f(B,C,D)で与えるというイメージです。
バーチャルセンサにより、物理量ではない変化を数値化して見える化を行うこともできます。
例えば感情は物理量ではありませんが、表情やしゃべり方と感情との相関が分かれば、感情の見える化ができます。心理学者プルチックは感情を「喜び」や「信頼」などを含み16種類に分析しましたが、バーチャルセンサならば「信頼」の検出センサも可能です。たとえば、信頼度変化A=f(表情の画像解析値、会話と音声の解析値)のような考え方です。
3.モデル制御の基本的な考え方(温度制御の例)
ここでモデル制御の基本的考えについて、バーチャルセンサも含めて説明したいと思います。
図(B)は、図(A)の説明に関連させ、ある容器環境にある温度変化(R)を加熱制御と冷却制御を用いて温度制御するという例を示したものです。
図(B)のB、C,Dが実際のセンサ、Aがバーチャルセンサとします。
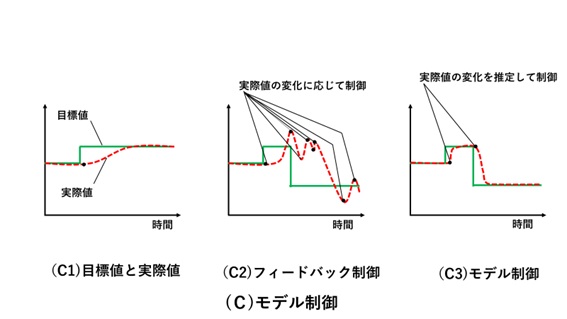
制御したい目標の温度変化に対して、実際の温度変化が遅くてもよい場合には、加熱制御あるいは冷却制御をゆっくり行う以下図(C1)のような制御で問題はありません。
一方、目標値の変化に早く追従しなければならない場合には、図(C2)のように、制御結果が分かってから加熱制御や冷却制御を行うフィードバック制御では制御誤差が大きくなります。
これに対して図(C3)で示したものは、モデル制御を用いて、加熱制御と冷却制御の影響を予測して制御し目標値の変化に追従させるものです。
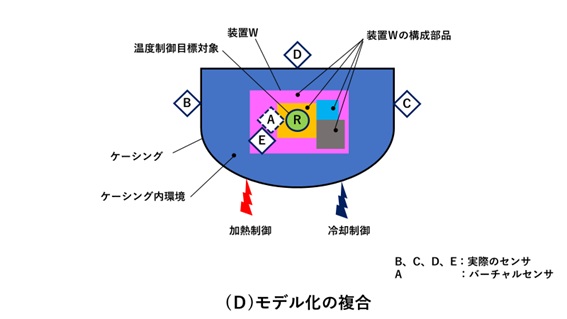
図(C)では単純な例で説明しましたが、以下図(D)は、もう少し複雑な例です。
図(C)の場合には、単純な伝熱モデルがあればモデル化による制御ができますが、図(D)において、装置が流れ中に配置された触媒装置の場合には、伝熱モデル以外に、熱分解反応モデル、流体モデルなどを加えて、全体をモデル化しなければなりません。
4.制御の目標と実際
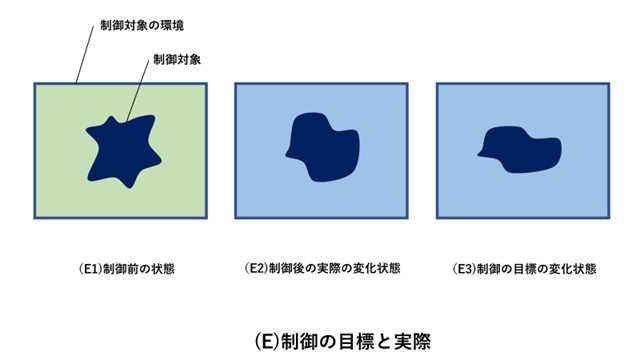
モデル化の集合として全体を制御する場合のイメージを以下図(E)に示します。
制御対象も制御対象の環境も変化するため、それらの変化をとらえて、実際の制御対象の状態を制御します。
図(E2)と図(E3)との差が、対応しなければならない制御誤差です。
この図で分かるように、制御誤差の定義は制御目標の定義や精度により決まり、実際のセンサとバーチャルセンサに求められる精度が決まります。
5.デジタルツインとは?
仮想環境において、制御対象と同一のデジタルモデルを「デジタルツイン」と呼びます。
以下図(F)にイメージを示します。
仮想空間では、実際のセンサとバーチャルセンサにより知りえた情報をベースに仮想の環境状態と仮想の制御対象、すなわちデジタルツインを作ります。
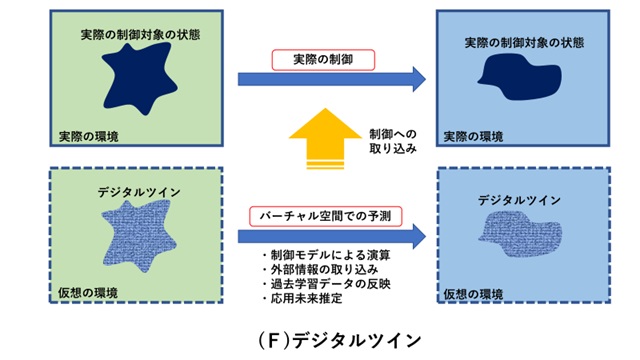
バーチャル空間でのトライアンドエラーを繰り返すことにより、デジタルツインを目標制御状態にできる制御を求めることができます。
外部情報の取り込みや、AIを用い、過去データの学習だけでなく、未来推定も可能になります。
ただし、目標制御精度に応じた、通信速度・容量や同時接続数の向上が必要になります。
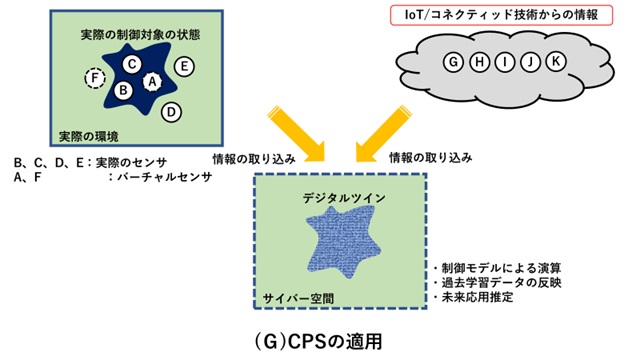
6.デジタルツインにCPSを適用
デジタルツインでは外部から情報を得るとともに、逆に外部に情報を提供し、ビッグデータとして活用することも可能です。
このように聞くと、それはIoT(Internet of Things、モノのインターネット接続による相互制御技術)ですね?ということになると思います。
IoTに関連する技術としてCPS(Cyber-Physical System)と呼ばれるものがあります。
CPSは、「実際の状態を様々なセンサで収集した大量の情報を用いて、サイバー 空間、すなわちバーチャルワールドで、モデル化やシミュレーションを行い、リアルワールドの制御を行う技術」とされています。
デジタルツインにCPSの考えを組み合わせると以下図(G)のようになります。
現在シンガポールでは、街のデジタルツインを作るプロジェクトがあるそうですが、5Gの先のxGの時代に通信速度と容量がさらに大幅にアップされ、量子コンピュータも普通に使われるようになるころには、地球のデジタルツインもできるかもしれませんね。
(日本アイアール株式会社 特許調査部 H・N)
☆各種センサ技術に関する特許調査・技術情報調査は日本アイアールまでお気軽にお問い合わせください。