車両の姿勢制御とは?ピッチング・ローリング・ヨーイングとESCの基本を解説

走行中の車両姿勢の乱れを抑制し、走行安全性・安定性と快適性を高める制御技術には、横滑り防止装置としての”ESC“(Electronic Stability Control)をはじめ、”ESP“(Electronic Stability Program)、”DSC“(Dynamic Stability Control)など、メーカーやシステムによりさまざまな名称があります。
これらは主に横滑りや旋回時の不安定挙動を抑える制御として知られていますが、本記事では、ピッチング、ローリング、ヨーイングなどを含む広い意味での車両の走行姿勢制御について解説します。
目次
1.走行中の車両姿勢と挙動
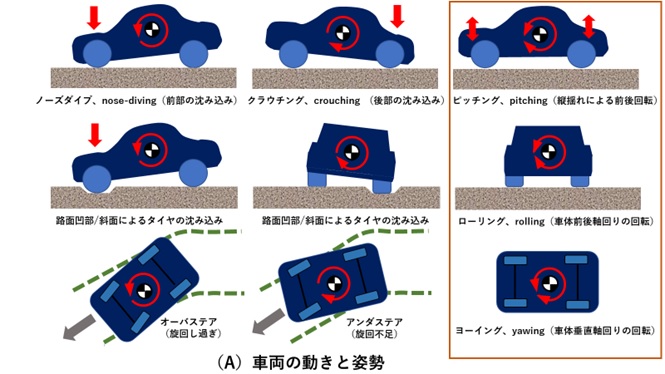
車両姿勢において起こり得る車両挙動とその呼び名について、図(A)にまとめました。
各挙動について説明します。
(1)ピッチング・ローリング・ヨーイングとは
運転者による運転操作や、路面などの状況や横風などの外乱因子により、車両姿勢は影響を受けます。
運転者の急減速によって車両前部が沈み込んだり、急加速によって車両後部が沈み込んだりします。このとき、車両には上下方向の動きとともに、車両の左右方向の軸を中心とした回転運動が発生します。このような挙動を「ピッチング」(pitching)と呼びます。
路面の凹凸の影響が左右輪で異なる場合には、車両の左右で上下動に差が生じ、車両の前後方向の軸を中心とした回転運動が発生します。このような挙動を「ローリング」(rolling)と呼びます。
次に、車両の水平方向の挙動変化を見ると、急なハンドル操作時やカーブ走行時、路面の傾斜、左右輪での滑りやすさの違いなどにより、運転者が意図した方向に対して車体の向きや進行方向が乱れることがあります。この場合には、車体の垂直方向の軸を中心とした回転運動が発生します。このような挙動を「ヨーイング」(yawing)と呼びます。
(2)オーバーステアとアンダーステア
車両が旋回するとき、運転者はハンドル操作によって進みたい方向を指示します。しかし、車速、路面摩擦係数、タイヤの状態、前後輪の荷重変化などによって、実際の車両の曲がり方は運転者の意図とずれることがあります。
運転者の操舵に対して、車両が意図したよりも内側へ曲がり過ぎる挙動(旋回し過ぎの挙動)を「オーバーステア」と呼びます。反対に、操舵しているにもかかわらず車両が十分に曲がらず、外側へ膨らむような挙動(旋回不足の挙動)を「アンダステア」と呼びます。
オーバーステアやアンダーステアが大きくなると、運転者が進みたい方向に車両を保つことが難しくなります。そのため、車両姿勢制御では、各輪の制動力や駆動力などを調整し、車両の向きや旋回挙動を安定させることが重要になります。
2.タイヤに発生する力と車両挙動
車両は質量をもち、慣性によって運動を続けようとします。これに対して、運転者の操作による駆動・制動や操舵、あるいは路面状況や横風などによって加速度が生じることで、車両の姿勢や挙動が変化します。
車両挙動により運転者が実際に感じる振動は、図(B)に示すように、タイヤとサスペンション(ばねと減衰装置)に支えられた車体側の部分、すなわちばね上部分の動きとして現れます。このため、振動の発生や変化には、ばね特性や減衰特性の設定・制御も影響を与えます。
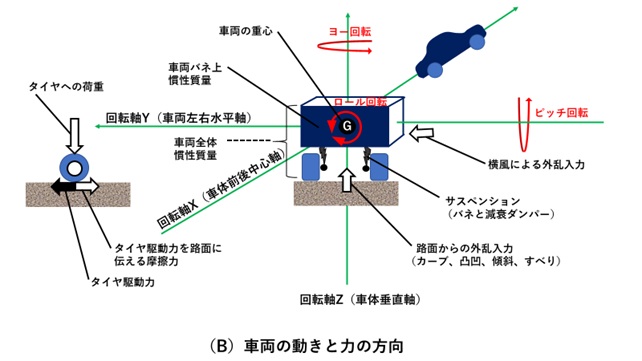
四つのタイヤのスリップ率の差は、車両の水平方向の回転挙動、すなわち旋回挙動にも影響を与えます。タイヤのスリップが過大になると、接地部で有効に発生できる駆動力・制動力・横力が低下し、車両の進行方向や旋回挙動に影響を与えます。
また、車体の傾きや揺れによって各タイヤにかかる荷重が変化すると、タイヤが発生できる力も変化します。左右輪で発生する駆動力、制動力、横力に差が生じると、車体にはヨーモーメントが発生し、旋回挙動に影響を与えます。
摩擦係数の低い路面で駆動や制動を行う場合には、駆動力が大き過ぎて車輪がスピン(空転)することや、制動力が大き過ぎて車輪がロックしてスリップすることを防ぐ必要があります。そのため、駆動力と制動力の両方を適切に制御することが重要です。ABS(アンチロック・ブレーキ・システム)は、制動時の車輪ロックを防ぎ、操舵性を確保しながら制動効果を高めるための制動力制御を行います。
3.車両姿勢に関する検出情報と制御の考え方
(1)車両状態を検出するセンサ
車両姿勢制御における主な目標は、車両が不安定な挙動を起こすことを予測して予防するような制御を行い、実際に不安定な挙動が発生した場合には、さらなる拡大を防ぎ、振動などの挙動による影響をできるだけ短時間で収束させることです。操舵に関しては、操舵の修正操作を減らし、運転者の運転負担を低減することも必要です。
このためには、センサにより、不安定な挙動が発生しやすい状態や、挙動の発生初期を検出しなければなりません。ヨーイング(車体旋回運動)の角速度を検出するセンサは、「ヨーレートセンサ」あるいは「ジャイロセンサ」とも呼ばれています。
(2)駆動・制動・操舵・懸架の協調制御
検出結果に対応する制御は、「走る」「止まる」「曲がる」に関係する駆動系、制動系、操舵系の三つの制御に加えて、車体振動に影響を与える懸架系(サスペンション)です。
コントロールユニットとしては、一つのユニットに統合して制御する場合と、複数のユニットで分散制御する場合があります。いずれの場合でも、各制御の協調を行いながら、制御モデルを用いたフィードフォワード制御や、PID制御などのフィードバック制御を行います。
[※関連記事:PID制御、フィードフォワード制御、そしてモデルベース制御 ]
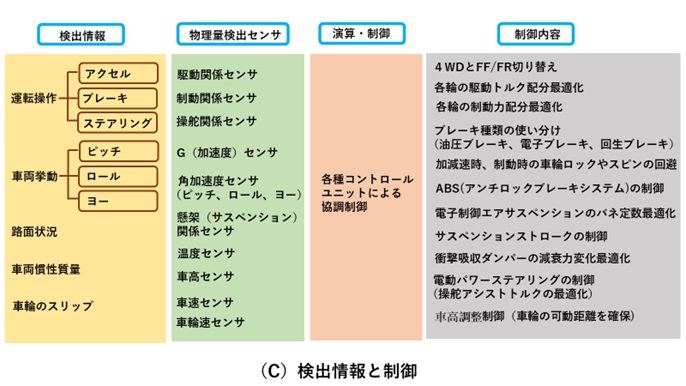
図(C)は、ある車両の事例を示したものではなく、車両の走行姿勢制御技術を、検出情報と制御の点からまとめたものです。実際の適用では、コストを低減したり、フェイルセーフ設計を含めてシステムが過度に複雑化することを避けたりするために、よりシンプルな構成を目指します。
(3)ESCによる車両安定化の基本
「ESC」(Electronic Stability Control)は、車両の横滑りや旋回時の不安定な挙動を抑えるための代表的な車両安定制御システムです。例えば、運転者の操舵に対して車両が曲がり過ぎるオーバーステアや、十分に曲がらず外側へ膨らむアンダーステアが発生した場合、ESCは車輪速、操舵角、ヨーレート、横加速度などの情報から車両の状態を判断します。
そのうえで、必要に応じて特定の車輪に制動力を加えたり、エンジンやモータの駆動力を調整したりすることで、車両の向きや旋回挙動を安定させます。ESCは、運転者の操作を置き換えるものではなく、タイヤと路面の摩擦限界の範囲内で、車両が不安定な状態に陥ることを抑制する支援システムといえます。
4.運転支援と制御のリスクへの対応
安全性や安定性に関する運転支援の効果が大きい場合は、別の言い方をすれば、図(D)に示すように、運転支援がなければ危険度が高い状態であるということになります。
例えば凍結路などで、左右の路面摩擦係数が異なる、いわゆるスプリットμ(ミュー)の路面を運転支援により無事走行できている場合には、運転支援がなければ危険な状態に陥る可能性があります。
運転支援には、主に二つのリスクがあります。
一つは故障により支援機能が低下または停止すること、もう一つは路面摩擦や車速などの条件が厳しく、運転支援制御だけでは車両挙動を抑えきれない状態になることです。
故障のリスクに対しては、フェイルセーフシステムの設計により、故障時にも、図(D)の(a)のように急激に危険な状態へ移行することを防がなければなりません。
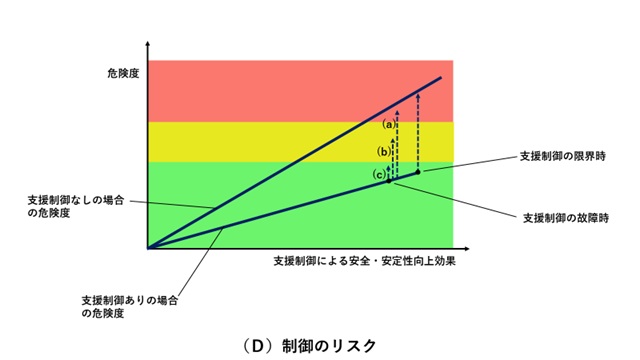
一方、支援制御の限界を超えるリスクへの対応としては、運転支援制御による危険回避への依存度が高くなった時点で、運転者にその状態を認識させ、限界を超えないように促すことも重要です。
例えば、システムが認識できる「制御なしの場合の危険度」があるレベルを超えた時点から、[視覚表示→音声報知→ハンドル振動などの触覚報知]のように、段階的に強い警告を行い、運転者への注意喚起と、穏やかな運転操作を促すという対応があります。
5.おわりに
車両の走行姿勢は、運転者の操作だけでなく、路面状況、タイヤの状態、横風などの外乱によって常に変化しています。車両姿勢制御は、こうした変化をセンサで検出し、駆動系、制動系、操舵系、懸架系などを協調的に制御することで、車両の不安定な挙動を抑え、走行安全性・安定性と快適性を高めるための重要な技術です。
一方で、どれほど高度な制御システムであっても、タイヤと路面の摩擦限界を超えた状態では、車両挙動を完全に制御することはできません。そのため、運転支援システムの効果を正しく理解するとともに、システムを過信せず、路面状況や車速に応じた運転を行うことが重要です。
今後も、センサ技術、制御技術、電動化技術、そして自動運転技術の進展により、車両姿勢制御はさらに高度化していくと考えられます。
(日本アイアール株式会社 特許調査部 H・N)