自動車産業のキーワード”CASE”とは?センサとの関わりと用語のまとめ

現在の自動車開発の動向において”CASE”(ケース)と呼ばれる4分野がありますが、今回はCASEと関連するいくつかのセンサや用語について解説します。
略語が氾濫していますが、関係ある用語をまとめてセットで記憶しておくと良いと思います。
1.CASEとは?
自動車業界の将来を考えるうえでの重要キーワードとされる”CASE”は以下の4分野を表します。
“C”: Connected (コネクティッド)
「つながるクルマ」とも呼ばれますが、何につながるかが、ポイントとなります。
つながる技術と言えばIoT(Internet of Things, モノのインターネット)を思い浮かべると思いますが、ここでのモノはクルマです。
つながる相手は、外部情報ネットワークやスマートフォンなどがあります。車内からの音声入力で、家にある電気装置の操作もできます。
外部からの情報を車両で活用するとともに、逆に、車両センサやカメラで得た情報を外部情報ネットワークで活用することができます。例えば、自動ワイパー用の雨滴センサからの情報により、車両走行位置の降雨情報を提供することができます。
“A”: Autonomous(自動運転)
自動運転では、自律性の高い制御の実現を目指していますので、言葉としては、オートマティックでもオートメイティッドでもなく、「自律」を意味するオートノーマス(Autonomous)が使われます。
[※関連記事:そうだったんだ技術者用語 “autonomous” と “automatic” (自動と自律、そして自立?)]
自動運転レベルは以下のように定義されています。
- レベル0:[運転支援なし]
- レベル1:[運転支援] システムがステアリング操作、加減速のどちらかをサポート
- レベル2:[運転支援] システムがステアリング操作と加減速の両方をサポート
- レベル3:[自動運転] 特定の場所でシステムが全てを操作、緊急時はドライバーが操作
- レベル4:[自動運転] 特定の場所でシステムが全てを操作
- レベル5:[完全自動運転] システムが全てを操作、場所の限定なし
自動運転には、周囲環境や車両の状況を検知するのに多くのセンサが用いられます。
自動運転では”fun to drive”(運転する楽しさ)は無くなりますが、それを残すために、自動運転車に”レベル0ボタン”というものを備え、好みでドライバーによる操作に切り替えられるようにするというアイデアもあります。
“S”: Shared & Services (シェアリングサービス)
個人所有せずに共有サービスを利用するというものです。
基本的には、connected技術と組み合わせた技術となります。
タクシーへの利用以外にも、個人所有車をネットワークに登録し、共有を提供する(使わない時に貸す)という形態もあります。
関連する言葉として“MaaS”(マース、Mobility as a Service)があります。
乗り物を所有せずに、使いたい時に料金を払って利用するサービスを表します。
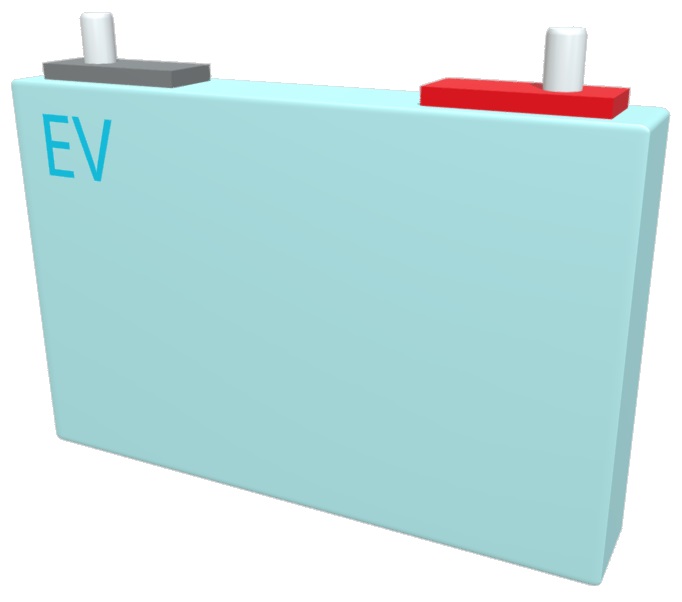
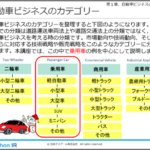
“E”: Electric & Electrified (電動化)
一番の電動化は、電気自動車(EV)化ですが、それ以外の電動化もあります。
EVでは、燃費ならぬ電費性能の向上が必要ですが、そのために補機類も電動化します。
例えば、これまで冷却用のファンをベルト駆動して、運転中は継続して回していたものをファンの電動化とON/OFFスイッチを用いることによって、必要のない時にはファンを作動させないということができます。
電気自動車は、災害時の電気供給の役目を果たすこともできます。
例えば、EVをバックアップ電源として使用したり、スマートフォンの充電用装置として使用することができます。
2.距離と画像を検出するセンサ関連用語
CASEに関連する技術のうち、A (Autonomous)の自動運転技術では、車外対象物の種類と距離を知るために、画像解析用カメラと距離センサが重要となります。
自動運転の各レベルに応じた情報を、如何に低コストで獲得するかを考え、カメラとセンサの種類と数を決めます。
以下に主なセンサと用語の説明をします。
(1)単眼カメラ(Monocular camera)、複眼カメラ(Stereo camera)
カメラを用いて画像を撮影し、AIと画像処理用プロセッサにより撮影画像の解析を行います。
単眼カメラでは対象物までの距離の計測はできませんが、複眼カメラ(ステレオカメラ)では、ずれた視点から同時に撮影を行うことによって、距離の計測ができます。
[※関連記事:ステレオカメラとは?測距の原理・方法の解説と主な車載用メーカーを紹介 ]
(2)遠赤外線カメラ(FIR Camera)、近赤外線カメラ(NIR camera)
夜間など視認性の悪い状況で、対象物をとらえることができます。
対象物の違いにより、赤外線を反射したり吸収する特徴が異なり、この特徴を用いて分類された画像ができます。
(3)超音波センサ(Ultrasonic Sensor)
一定方向の距離を測定できます。
ミリ波レーダと比べると、超音波センサは周波数帯が低いため、直進性が低く、計測距離も短いので、自動駐車時などのように近距離の障害物を検出するためのセンサとして用いられます。
[※関連記事:超音波センサの基礎知識を徹底解説|仕組み・特徴・使用例などがこれ一つでわかる! ]
(4)76GHzミリ波レーダ、24GHzミリ波レーダ(Radar)
ミリ波は周波数帯が30GHz~300GHzの電磁波で、直線性が強く、波長で表すとミリオーダーの長さ(1~10mm)になることから、ミリ波と呼ばれています。
車両前方検出用としてよく用いられるのが76GHzミリ波レーダで、後方や側方検出用によく用いられるのが24GHzミリ波レーダです。
ミリ波レーダは、対象物に対して電波を用いて計測するため、天候などによる視認性悪化の影響を受けないというメリットが有りますが、一方、電磁波の反射率の低い対象物では検出力が低下するというデメリットもあります。
[※関連記事:ミリ波レーダーとは何か?仕組みや特徴、LiDARとの比較など徹底解説! ]
(5)LiDAR(ライダー、Laser Imaging Detection and Ranging)
LiDARとは「レーザ画像検出と距離測定」を指す用語です。レーザ光を対象物にパルス状に照射し、反射して戻ってくる時間により対象物までの距離や方向を計測します。
LiDARではレーザ光を使うため、電波照射では反射率が低いような対象物の場合でも検出が可能です。
[※関連記事:先進運転支援システム(ADAS)と測距センサの種類・方式 ]
以上、個別のカメラやセンサについて説明しましたが、単一のセンサではなく、複数のセンサを用いて検知情報を統合処理し、より高度な認識情報を得ることをセンサフュージョン(sensor-fusion)と呼びます。
(日本アイアール株式会社 特許調査部 H・N)
☆各種センサ技術に関する特許調査・技術情報調査は日本アイアールまでお気軽にお問い合わせください。