PID制御の基本を解説!PID動作の考え方・計算式も整理
今回は、プロセス制御によく用いられるPID動作とPID制御について解説します。
1.比例動作(P動作)
入力の変化に、出力(操作量)が単純比例する場合を「比例要素」といいます。
伝達関数は G(s) = Kp となります。
Kpは「比例ゲイン」とよばれる比例定数です。
比例動作(P動作)は、操作量を偏差に比例して変化させる制御動作です。
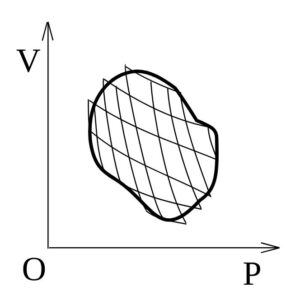
図1に示すような、全操作量範囲に対する偏差範囲のことを「比例帯」(Proportional Band)といいます。
比例帯が狭いほど、わずかな偏差に対して操作量が大きく応答し、動作は強くなります。比例帯の逆数が比例ゲインです。
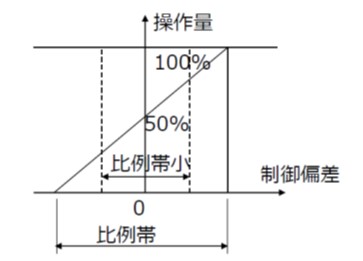
[図1 比例帯]
微分動作操作量をYp、偏差をeとおくと、次の関係があります。
Yp = Kpxe ・・・(1)
比例ゲインを大きくすれば、偏差が小さくても大きな操作量を得ることができます。
しかし、あまり比例ゲインを大きくし過ぎるとオンオフ制御に近くなり、目標値に対する行き過ぎと戻り過ぎを繰り返す「サイクリング現象」が生じます。サイクリング現象を起こさない値に比例ゲインを設定すると、偏差は完全には0にならず、定常偏差(オフセット)が残るという欠点があります。
2.積分動作(I動作)
操作量が偏差の時間積分に比例する制御動作を行う場合です。
伝達関数は次の式で表されます。
![]()
ここでTiは、「積分時間」と呼ばれる定数です。
積分動作は、操作量が偏差の時間積分値に比例する制御動作です。
積分動作の操作量をYiとすれば、次の式の関係があります。
![]() ・・・(2)
・・・(2)
積分時間は、ステップ入力を与えたときにP動作による出力とI動作による出力とが等しくなる時間と定義します。
積分動作では偏差が存在する限り操作量が変化を続け、偏差がなくなったところで安定しますので、比例動作と組み合わせてPI動作として用いられます。
PI動作における操作量Ypiとすれば、(1)、(2)式より
![]() ・・・(3)
・・・(3)
PI動作は、偏差を無くすことができますが、伝達遅れの大きいプロセスや、むだ時間のある場合は、安定性が低下するという弱点があります。
3.微分動作(D動作)
偏差の変化速度に比例して操作量を変える場合です。
伝達関数は G(s) = TD x s で表されます。
ここでTDは、「微分時間」と呼ばれる定数です。
微分要素は、比例要素、積分要素と組み合わせて用います。
微分動作は、偏差の変化速度に比例して操作量を変える制御動作です。
微分動作における操作量をYdとすれば、次の式の関係があります。
![]() ・・・(4)
・・・(4)
微分時間は、偏差が時間に比例して変化する場合(ランプ偏差)、比例動作の操作量が微分動作の操作量に等しい値になるまでの時間と定義します。
温度制御のようにおくれ要素が大きかったり、遠方へプロセス液を移送する場合のようにむだ時間が生じたりするプロセスでは、過渡的に偏差が生じたり、長い整定時間を必要としたりします。
そこで微分動作を組み合わせ、偏差の微分値に比例して、偏差の起き始めに大きな修正動作を行えば、より良い制御を行うことが期待できます。
4.PID制御
PD動作では偏差の変化に対する追従性が良くなりますが、定常偏差をなくすことはできません。
基本的な制御動作であるP動作と、オフセットを無くすI動作、および偏差の起き始めに修正動作を行うD動作、を組み合わせた「PID動作」とすることにより、色々な特性を持つプロセスに対して最も適合した制御を実現することができます。
図2に、PID制御による負荷変化に対する追従性向上のイメージを示します。
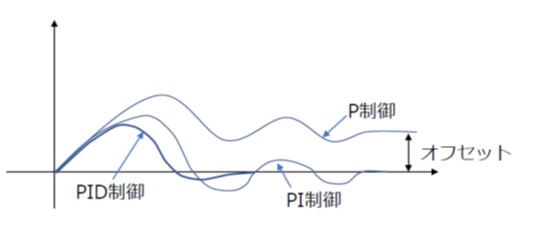
[図2 負荷変化追従性(イメージ)]
PID動作の操作量をYpidとすれば、式(3)(4)より
![]()
- 目標値にできるだけ早く、または設定時間通りに到達すること
- 目標値に対するオーバーシュート(行き過ぎ)がなるべく少ないこと
- 目標値で安定して運転できること
- 外乱が加わった場合に、素早く目標値に復帰できること
これらの求められる最適な制御性を得るためには、比例ゲイン、積分時間、微分時間、というPID各動作の定数を適正に設定し、調整(チューニング)することが重要になります。
ということで今回は、プロセス制御によく用いられるPID制御について書きました。
6回にわたり自動制御の基本的な知識について解説してきました。
安定条件については一部の解説にとどめ、他にも本コラムで触れていない項目もありますが、機械設計者が制御設計者と打ち合わせをする上で最低限必要となる前提知識をまとめたつもりですので、参考にして頂ければ幸いです。
(日本アイアール株式会社 特許調査部 S・Y)
《併せて読みたい関連コラム》



](https://engineer-education.com/wp/wp-content/uploads/2019/06/facility_PM-150x150.png)