IMUセンサとは?慣性計測の基本原理から誤差補正・センサフュージョンまで徹底解説

GPSの届かない場所で、デバイスはどう「自分」を知るのか?
トンネル内の自動運転や屋内ロボットの自律走行において、位置特定を支えているのはGPSではなくIMUセンサです。今や「動きの神経系」として不可欠となったこのセンサは、AIとの融合でさらに進化中です。
本記事では、基本構造からSLAMへの応用、そして今後の展望まで、IMUセンサの全容を体系的に解説します。
目次
1.IMUセンサとは
「IMUセンサ」(Inertial Measurement Unit:慣性計測装置)とは、物体の加速度や角速度をリアルタイムで検出し、位置や姿勢の変化を推定するセンサのことです。スマートフォン、ドローン、自動車、ロボット、ウェアラブルデバイスなど、現代のあらゆるモーションデバイスに搭載されています。
外部のGPS信号やカメラ画像が得られない状況でも、IMUセンサだけで物体の動きを把握できることが最大の特徴です。
IMUは一般的に、加速度センサ(Accelerometer)とジャイロセンサ(Gyroscope)、場合によっては地磁気センサ(Magnetometer)を組み合わせた構成を取ります。これらを一体化したモジュールが「6軸IMU」や「9軸IMU」と呼ばれ、各種電子機器の基幹部品として広く利用されています。
図1にIMUの基本的な構成・組み合わせを示します。
【図1 IMUの構成・組み合わせ】
2.IMUセンサの仕組みと原理
IMUセンサがどのようにして物体の動きを数値として捉えるのかを理解するには、その内部構造と動作原理を知る必要があります。
IMUは、加速度センサ、ジャイロセンサ、地磁気センサといった複数の要素を組み合わせ、時間的な変化を検出することで運動を解析します。
[※関連記事:加速度センサとジャイロセンサの基礎知識 ]
ここでは、それぞれのセンサがどのように機能しているのかを詳しく見ていきましょう。
(1)加速度センサの原理
加速度センサは、物体に加わる加速度(並進運動の速度変化率)を検出する素子です。
加速度センサでは、一般的にMEMS技術(Micro Electro Mechanical Systems)を利用しており、微小な質量体(マス)をばねで支持した構造を持っています。
[※関連記事:3分でわかる MEMSとは?製造工程、MEMSセンサーの材料・用途などを解説 ]
加速度が加わるとマスがわずかに変位し、この動きを静電容量やピエゾ抵抗の変化として検出します。この電気信号を処理することで、センサは、どの方向にどれだけの加速度が発生しているかを出力します。
図2に示すように、加速度センサで検出した加速度値を積分することで、理論上は位置の変化(どのように移動してどの位置にあるか)を認識することができます。ただし、センサ単体での積分は時間の経過とともに誤差が蓄積しやすいため、実用的には他センサによる補正(後述)と組み合わせて利用されます。
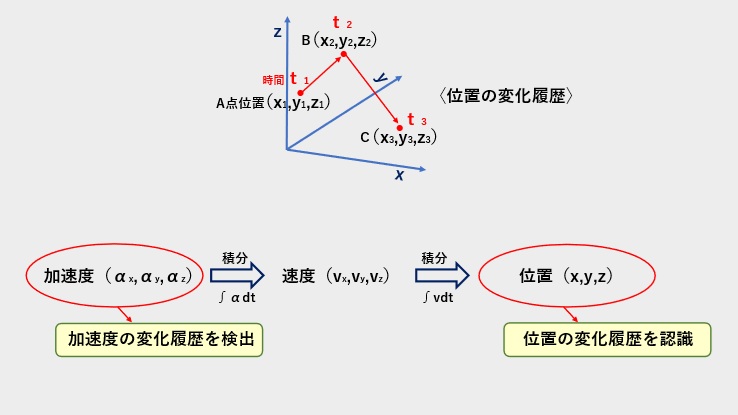
【図2 加速度センサによる位置認識】
スマートフォンの画面回転機能や歩数計など、日常的な動作検出にもこの仕組みが活用されています。
(2)ジャイロセンサの原理
ジャイロセンサは、物体の角速度(回転運動の速さ)を検出するためのデバイスです。
MEMS型ジャイロセンサでは、内部の振動子が回転運動によって生じるコリオリ力を検出します。たとえば、センサが回転すると、振動する質量に対して直交方向に力が働きます。この微小な動きの変化を電気信号として取り出し、角速度として計算します。
図3に示すように、ジャイロセンサにより、各方向の角速度の変化履歴を検出することで、各方向の回転角度の変化(どのように回転してどの角度にあるか)を認識することができます。
ヨー角,ピッチ角およびロール角を知ることで物体の三次元的な向きの変化(姿勢がどのように変化してどのような姿勢であるか)を認識することができます。
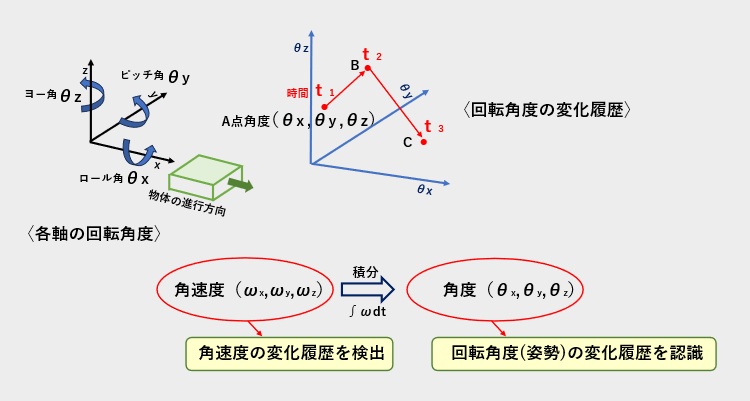
【図3 ジャイロセンサによる姿勢認識】
ジャイロセンサにより、位置が変わらずに姿勢が変化しているような動きも認識することができます。
ドローンやカメラの手ぶれ補正機構、ゲームコントローラなどでは、姿勢の安定化や動作認識にこのジャイロセンサが欠かせません。
ジャイロセンサには、MEMS方式のほかに、FOG方式(Fiber Optical Gyroscope)と呼ばれるものがあります。FOG方式は、光ファイバーコイルを用いて光の位相差を測定するため、MEMS方式に比べ振動由来のノイズに関しては有利ですが、サイズが大きくなります。航空機の姿勢制御など高精度を求められるものに使われています。
(3)地磁気センサの役割
地磁気センサ(マグネティックセンサ)は、地球の磁場を検出して方位を判断するセンサです。IMUに組み込むことで、ジャイロセンサや加速度センサだけでは補えない「方向基準」を提供します。ジャイロセンサは時間の経過とともに誤差(ドリフト)が蓄積するという弱点がありますが、地磁気センサがあれば地球磁場を基準に補正でき、長時間の姿勢推定が安定します。
3.IMUセンサによる位置と姿勢の推定に対する誤差の補正
IMUセンサの各素子が検出した加速度や角速度のデータは、単体では「運動の一瞬」を表すに過ぎません。
しかし、それらを時間的に積み上げることで、物体がどの方向へ、どれだけ動いたか(位置)、そして、どのように回転したか(姿勢)を推定することができます。
(1)デッドレコニングの仕組み
IMUによる位置推定は、上述したように、基本的に積分演算によって行われます。
加速度を1回積分すれば速度、2回積分すれば位置が求まります。また、角速度を積分すれば姿勢の変化が算出されます。
このように、前の状態から次の状態を逐次的に推定していく手法を「デッドレコニング」(Dead Reckoning)と呼びます。航法分野では古くから使われてきた手法で、GPS信号が遮断される環境でも動作できる利点があります。
(2)誤差とドリフトの問題
しかし、IMUによる位置推定には精度の限界があります。
センサの出力には微小なノイズやバイアス(オフセット)が含まれており、積分を繰り返すと誤差が時間とともに蓄積します。この誤差が、「ドリフト」と呼ばれる位置のずれを引き起こします。
数秒から数分で数メートル単位の誤差が発生することもあり、長時間の測位では影響が大きくなります。このため、IMU単体での位置推定は短期間・短距離の動作認識には有効ですが、長期間・長距離の移動推定では補正が必要です。
(3)センサフュージョンによる補正
精度向上のために用いられるのがセンサフュージョン技術(複数のセンサを用いて認識能力を向上する技術)です。
IMUでの適用では、IMUの加速度センサやジャイロセンサで得た加速度・角速度データを、地磁気センサや、GPS、カメラなどの情報と統合して認識値を補正します。
代表的な補正アルゴリズムに、カルマンフィルタやマドウィックフィルタなどがあります。自動運転車の制御の例では「IMU+GNSS(衛星測位)」の組み合わせにより、屋外では高精度な位置推定を行い、トンネル内など衛星信号が遮断される場所ではIMUが航法を継続します。
このように、IMUは他のセンシング技術を支える運動の基礎情報源として、ハイブリッド測位システムに不可欠な存在です。
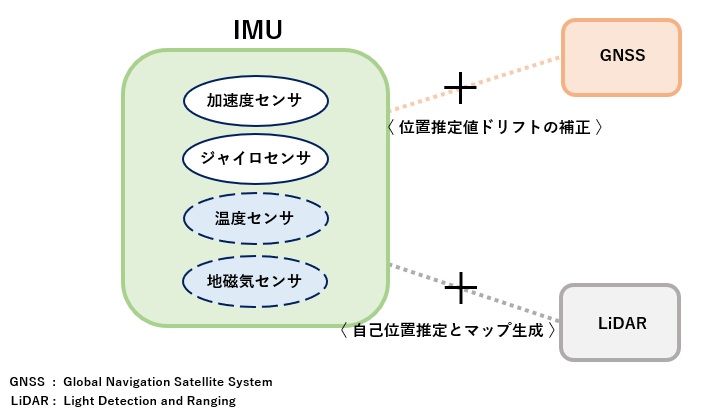
車両おける自動運転制御において、外部環境、位置や姿勢の認識のために、複数のセンサを搭載する事例を図4に示します。
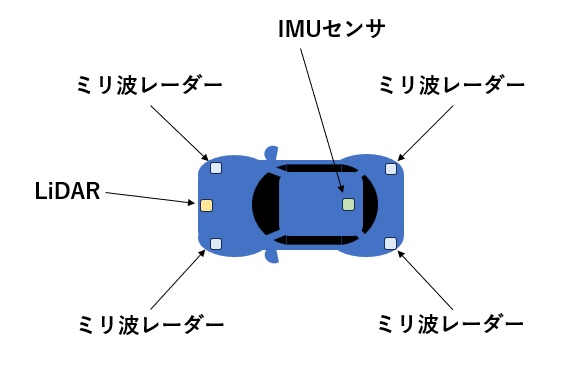
【図4 車両におけるセンサフュージョン】
車両で自己位置推定とマップ生成を行うSLAM(Simultaneous Localization and Mapping)という技術においては、LiDAR(Light Detection and Ranging)とIMUセンサの補完により精度を高めることができます。すなわち、IMUセンサは加速度や角速度を連続的に取得することができ、LiDARよりもIMUセンサの方が検出頻度が高いため、IMUセンサによる補完により、車両の位置が高速で変動する場合でも精度の高い位置推定を行うことができます。
[※関連記事:自動車産業のキーワード”CASE”とは?センサとの関わりと用語のまとめ ]
4.精度を決める要素
IMUセンサの精度に関する要素をもう少し詳しく見てみましょう。
図5に示す各要素について説明します。
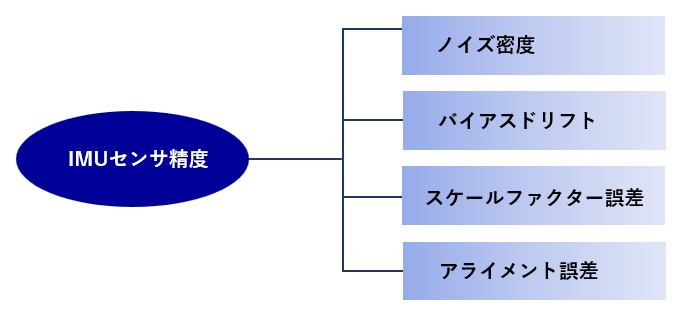
【図5 IMUセンサの精度】
| 要素 | 内容 |
| ノイズ密度 | センサの出力に含まれるランダムな揺らぎ。小さいほど高精度。 |
| バイアスドリフト | 時間経過によって出力が少しずつずれる現象。長時間の計測で影響大。 |
| スケールファクター誤差 | 出力の感度が理論値と異なる誤差。温度変化で発生しやすい。 |
| アライメント誤差 | 各軸の方向が理想的な直交関係にないことによる誤差。 |
これらの誤差を低減するために、高精度IMUでは、温度センサと温度補償回路、ノイズフィルタ、さらには自己校正アルゴリズムが導入されています。また、機械学習を用いてセンサ特性を補正する研究も進んでいます。
高精度なIMUは、航空機や自動運転車、測量ドローンなどに使われます。一方、スマートフォンなどの民生用途では、低コスト・小型・低消費電力を重視した設計が採用されています。用途に応じた目標精度の設定が必要になります。
5.性能評価と設計パラメータ
IMUセンサの性能を評価する際には、図6のような指標が用いられます。
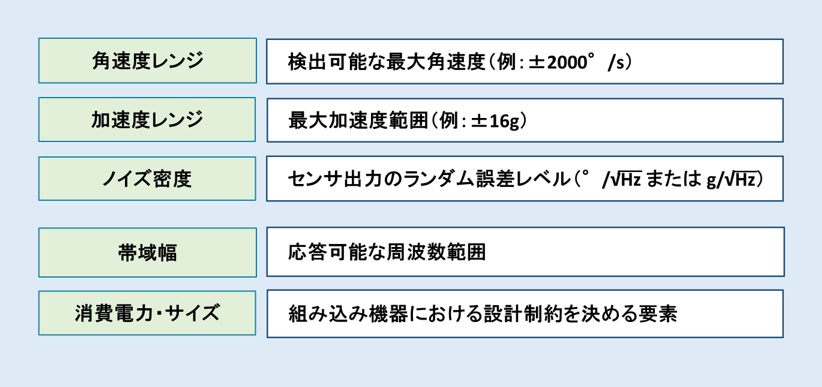
【図6 IMUセンサの性能評価指標】
これらのパラメータのバランスをとることで、対象アプリケーションに最適なIMUセンサを選定できます。
たとえば、自動運転分野では高い精度と低ドリフトが求められるため、高性能な光ファイバージャイロ(FOG)やリングレーザー型IMUが用いられます。一方、ドローンやスマートデバイスでは、MEMSベースの小型軽量なIMUが一般的です。
6.IMUセンサの応用分野
IMUセンサの応用は非常に幅広く、以下のような分野で中核的な役割を果たしています。
- 自動運転・モビリティ:
GPSが届かないトンネルや地下駐車場などでも車両の位置を推定し続けるため、IMUセンサは自律航法に欠かせません。
高精度なIMUは、LiDARやカメラと組み合わせてIMU-GNSS統合測位システムとして動作します。 - ドローン・ロボティクス:
ドローンの安定飛行やロボットの自己位置推定には、姿勢制御用IMUが不可欠です。
特に制御ループの応答速度を左右するため、低遅延・高サンプリング性能が重視されます。 - スポーツ・医療・VR/AR:
ウェアラブルIMUを使えば、人間の動作解析やリハビリ支援、仮想現実での身体追従が可能です。これにより、従来はカメラが必要だったモーションキャプチャを、小型センサだけで実現できます。
7.今後の展望 ― IMUセンサの高精度化とAI融合
近年、IMUセンサの進化は「高精度化」と「知能化」の両面で加速しています。
特にAIとの融合が進み、IMUデータを用いた自己学習的姿勢推定や異常動作検知が実現しつつあります。
また、ノイズリダクションやドリフト補正をニューラルネットワークで行う研究も盛んで、従来の数値積分モデルよりも高い安定性を示しています。
さらに、低消費電力・超小型化の進展により、IMUはIoT機器やウェアラブルデバイスの「動きの神経系」として不可欠な存在となりつつあります。
今後は、より「知的な慣性計測」への進化が期待されます。
(日本アイアール株式会社 特許調査部 H・N)