ミリ波レーダーとは何か?仕組みや特徴、LiDARとの比較など徹底解説!

近年、自動運転や先進運転支援システム(ADAS)の普及に伴い、車両に搭載される各種センサーの重要性が急速に高まっています。その中でも「ミリ波レーダー」は、高精度な距離測定と速度検知を可能にするセンサーとして、自動車業界で注目されています。
本記事では、ミリ波レーダーの仕組み(原理)や構造、用途、さらにはLiDARや単眼カメラとの違いや弱点まで、基礎から応用までを詳しく解説します。
目次
1.ミリ波レーダーとは?
「ミリ波レーダー」とは、ミリ波帯(30GHz〜300GHz)の高周波電磁波を用いて、対象物(ターゲット)との距離や速度、方向を測定するレーダーシステムです。波長にして約1〜10mmのミリ波を使用することから、この名称が付けられています。
この技術はもともと軍事や航空分野で使用されていましたが、近年は自動車への車載用途を中心に、民間分野への応用が急速に進んでいます。
2.自動車分野におけるミリ波レーダーの用途
車載用ミリ波レーダーの主な用途を以下に示します。
- 前方衝突警報(FCW:Forward Collision Warning)
- 自動緊急ブレーキ(AEB:Autonomous Emergency Braking)
- アダプティブクルーズコントロール(ACC:Adaptive Cruise Control)
- ブラインドスポットモニター(blind spot monitor)
- 駐車支援システム(park assist system)
これらの制御機能においては、走行中の車両が、周囲の障害物や他車との距離・相対速度を正確に把握することが必要不可欠となります。ミリ波レーダーはそれを可能とするセンサの一つです。
[※関連記事:先進運転支援システム(ADAS)と測距センサの種類・方式 ]
3.ミリ波レーダーの原理と仕組み
(1)電波の反射を利用した測距・測速
ミリ波レーダーの原理は、電波を対象に照射し、その反射波を受信して処理することで、距離や速度を求めるというものです。ドップラー効果により、対象物の相対速度も検出できます。(図1)
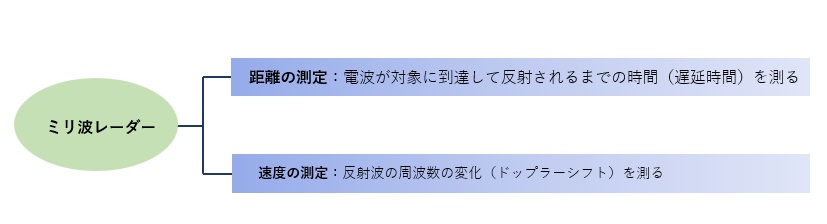
【図1 ミリ波レーダーによる測定】
(2)アンテナのビーム制御
レーダーのアンテナは、電波の送信・受信を担う中核部品です。
電子的にビームを制御するフェーズドアレイアンテナ(phased array antenna)が用いられることが多く、ステアリング(走査方向制御)によって広い視野を確保できます。フェーズドアレイアンテナでは複数の小型アンテナを配列し、それらによるビーム位相を位相シフト回路を用いて制御します。
4.周波数と波長の特徴
波長にして約1〜10mmのミリ波を使用するミリ波レーダーを、周波数で表し代表的な周波数帯域を挙げると以下の通りです:
- 24GHz帯:近距離(〜30m)、低価格
- 77GHz帯:中〜長距離(〜250m)、高精度、耐干渉性に優れる
- 79GHz帯:より高分解能、将来の標準候補
これらの周波数は波長に換算すると、図2のようになります。
波長が短くなるほど解像度が向上し、小さな対象物の検知が可能になります。
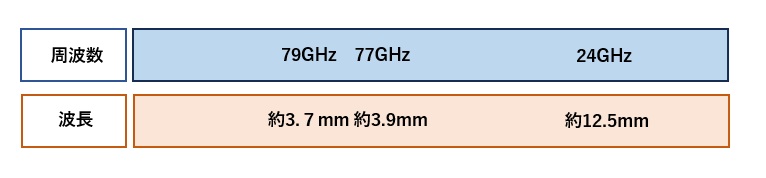
【図2 ミリ波の周波数と波長】
5.ミリ波レーダーの構造とハードウェアの概要
車載ミリ波レーダーは、一般的に以下図3のような構造を持ちます。
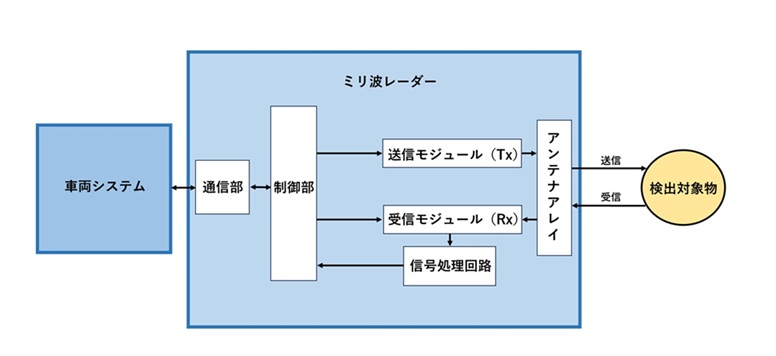 【図3 車載ミリ波レーダーシステム】
【図3 車載ミリ波レーダーシステム】
- 送信モジュール(Tx): 電波を発信する
- 受信モジュール(Rx): 反射波を受信する
- アンテナアレイ: 送受信を行う平面アレイアンテナ
- 信号処理回路: 反射波の解析
- 制御部: 送受信の制御
- 通信部: 車両との連携
最近では、CMOSやSiGeを用いた集積化が進んでおり、小型・低コスト化も加速しています。
6.ミリ波レーダーの特徴(強みと弱点)
ミリ波レーダーを車両制御システムに用いるにあたっての強みと弱点について、以下にまとめました。
- 昼夜・天候を問わない安定性: 光に比べて霧や雨の影響を受けにくい
- 速度測定が可能: ドップラー効果により、対象の移動速度を即時に把握
- 遠距離の検知が可能: 高出力で長距離にも対応
【ミリ波レーダーの弱点(デメリット)】
- 解像度の限界: カメラやLidarと比べると対象物の形状や種類の識別が難しい
- 干渉リスク: 周囲の車両からの電波干渉を受ける可能性
- 金属以外の反射率が低い: 人やプラスチック製品など非金属物体の検知に限界がある
次に、ミリ波レーダーと同様に車両環境認識センサとして用いられるLiDARや単眼カメラとの違いについて比較しながら整理してみましょう。
7.LiDARや単眼カメラとの違い
自動運転車両やADASの高度化に伴い、ミリ波レーダーの他にもLiDAR(ライダー、Light Detection and Ranging)や単眼カメラといった様々なセンサーが併用されるようになっています。
それぞれの技術には一長一短があり、用途や目的に応じた役割分担と補完性が求められます。
(1)LiDAR(ライダー)との比較
各特性に関してLiDARとの比較をまとめたものを表1に示します。
【表1 LiDARとの比較】
| 特性 | ミリ波レーダー | LiDAR |
| 測定原理 | 電波(ミリ波) | レーザー光 |
| 距離測定 | 〇 | ◎ |
| 速度測定 | ◎ | △(通常できない) |
| 解像度 | △ | ◎ |
| 悪天候耐性 | ◎ | △ |
| 価格 | 〇 | 高価 |
LiDARは、レーザー光を用いて周囲の対象物までの距離を非常に高い精度で計測するセンサーです。レーザーを回転またはスキャンさせて3次元的にデータを取得することから、環境の立体的な把握に優れています。
一方、ミリ波レーダーは電波を使用しているため、霧や雨、雪といった悪天候に対して強く、昼夜を問わず安定して動作するという大きな利点があります。速度検知能力にも優れており、対象の移動速度をリアルタイムで把握できます。ただし、ミリ波は波長が長いため、LiDARに比べて解像度が低く、対象物の形状や輪郭の詳細を捉えることは苦手です。
LiDARは歩行者、自転車、車両などを精緻に識別できる一方、ミリ波レーダーは存在検知と移動情報の取得に特化している傾向があります。
また、LiDARは高価でありコスト面に課題があります。一方、ミリ波レーダーは比較的安価で量産に向いているため、自動車に多数搭載しやすいメリットがあります。
(2)単眼カメラとの比較
各特性に関して単眼カメラとの比較をまとめたものを表2に示します。
【表2 単眼カメラとの比較】
| 特性 | ミリ波レーダー | 単眼カメラ |
| 測定原理 | 電波反射 | 可視光画像 |
| 距離測定 | 〇 | △(推定のみ) |
| 速度測定 | ◎ | × |
| 識別能力 | △ | ◎(AI処理と組み合わせて) |
単眼カメラは一般的な可視光を用いて画像を取得するセンサーで、人間の目に近い認識を実現します。画像解析技術やAIとの組み合わせによって、標識の認識、車線の検出、歩行者の分類などを行うことができ、対象物の種類や意味を識別するのに優れています。しかしながら、カメラは天候や照度の影響を受けやすく、逆光や夜間、雨天時には性能が低下する可能性があります。また、距離や速度の直接測定はできません。対象との距離は画像解析により間接的に推定するにとどまります。
これに対してミリ波レーダーは、暗闇や悪天候でも動作可能であり、距離と速度の情報を直接かつ正確に取得できるという強みがあります。
したがって、単眼カメラは認識担当、ミリ波レーダーは検知担当として使用するという考えがあります。
8.センサーフュージョンの重要性
現在の自動運転技術では、単一のセンサーでは不十分とされ、複数センサーの融合(センサーフュージョン)による総合的な環境把握が必須とされています。ミリ波レーダーがLiDARやカメラと組み合わされることで、それぞれの弱点を補い、高精度かつ高信頼な認知を実現します。
例えば、ミリ波レーダーで「物体の接近速度」を把握し、カメラで「それが歩行者かどうか」を識別し、LiDARで「形状と位置関係」を詳細に確認する、というように役割が分担されているのです。
さらに車両システムでは、安全性を高めるために、構成するコンポーネントやセンサーの故障診断や故障への対応が必要です。異なる原理のセンサーを複数もつことは、故障検知能力と対応力の向上に繋がります。
[※関連記事:センサのコンセプト開発における着眼点と重要ポイント ]
図4に車両の外部環境を検出するセンサーフュージョンで用いられる各種センサをまとめました。
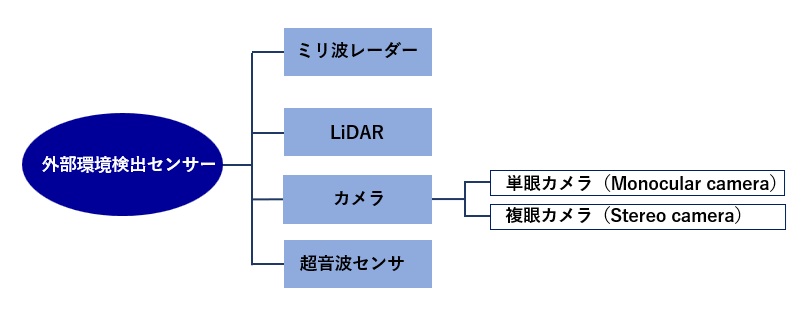
【図4 車両外部環境を検出するセンサー】
9.まとめ
ミリ波レーダーは、車載センサーとして高いポテンシャルを持つ技術であり、その仕組みや原理は比較的シンプルながら、極めて有効です。特に自動運転の実現には不可欠な存在となっており、今後さらに高性能化・小型化が進むことが期待されます。
ミリ波レーダーとは何かを正しく理解し、他のセンサーとの違いや弱点を把握することは、次世代モビリティ技術を支えるうえで非常に重要です。
(日本アイアール株式会社 特許調査部 H・N)