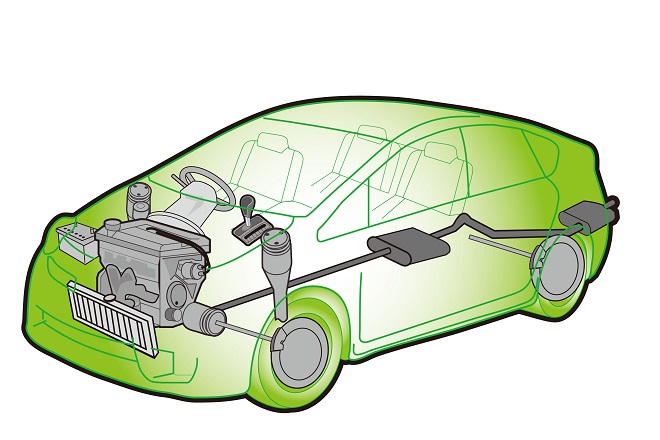
「自動運転車vs人間運転車」を設計課題で考えてみると?

自動運転車と人の運転する車を比較しながら、自動運転の設計課題を考えてみましょう。
他のAI(人工知能)を用いた制御システムにも関連する話もあります。
運転者の機能
AIにより人間が行っている機能をサポートとしよう、あるいは置きかえていこうと考える場合には、人間が行っていることとはいったい何かということを考えなければなりません。
まずは現在、運転者が行っていることを分析してみましょう。
- 基本的な運転における、意図⇒認知⇒判断⇒操作
- 荷物を運ぶ
- 緊急対応(例えば地震発生時の対応)
- 事故対応
- 情報を得る、音楽などを楽しむ
(これらを合わせてInformation + Entertainmentでインフォテイメントと呼びます) - 同乗者の対応をする(世話、サービス)
- 運転を楽しむ(Fun to drive)
7.は、自動運転では無くなります。
今後、自動運転が進むとUX(User Experience, ユーザーが製品を通じて得る体験)に基づき新たな機能(例えば健康診断、マサージなど)が登場する可能性があります。
自動運転のレベル(定義)
自動運転のレベルは以下のように定められており、レベル3においては、緊急時にドライバーが自動運転車に替わり運転操作をしなければなりません。
- レベル0:ドライバーがすべてを操作
- 【運転支援】レベル1:システムがステアリング操作、加減速のどちらかをサポート
- 【運転支援】レベル2:システムがステアリング操作、加減速のどちらもサポート
- 【自動運転】レベル3:特定の場所でシステムが全てを操作、緊急時はドライバーが操作
- 【自動運転】レベル4:特定の場所でシステムが全てを操作
- 【完全自動運転】レベル5:場所の限定なくシステムが全てを操作
自動運転レベル5の本格的な時代では、車の内部レイアウトも変わり、動くリビングルームのようなものも登場するかもしれません。

うちのオトーサンより運転が上手!?
自動運転レベル3の定義における、「緊急時は」という内容はどのようなものでしょうか?
① 自動運転車で想定してない状況
(AIは学習済みのことは完全に実行できますが、人間の考え&行動の柔軟性によって臨機応変に対応できることができない場合があります)
② 自動運転車システムの技術を越えた状況
(例えばセンサの認識限界外、システムのバックアップ制御で対応できない故障)
レベル3の場合には、それまで任せていた運転を「急に替わって下さい」と言われることになります。
自動運転車を夫婦で見学していて、感想を聞かれたオクサンが、「うちのオトーサンより運転が上手!」と答えていました。
自動運転は、車の運転が苦手な人や認知・判断・操作能力の低下した人にとって助けとなると言われていますが、そのような人や自動運転車で最近運転をご無沙汰している人に、①や②の際に自動運転車に替わって運転ができるでしょうか?
自動運転レベル3の設計課題:
- 自動運転レベル3において、運転を替わるケースをどういう範囲・条件にするか
- 運転交替のプロセス(状況を運転者や外部に知らせる、対応をガイドするなど)
バスの自動運転技術で、ドライバーが急に具合が悪くなった時に、運転支援によって左側に寄せて安全に停止するというものがあります。レベル3の車でも、最低ラインとして、安全に止めるまでは車が対応でき、その後の操作を運転者(乗員)に行ってもらうというようなシステム安全性設計が求められると思います。
機械に対する期待値を下げる
自動運転車は「うちのオトーサンより運転が上手」と褒められましたが、ひとたび運転を任せたとたん、オカーサンの期待はジャンプして「機械だから完全にできるはず」となります。
自動運転 実験車で前方のトラックの白い塗装の反射でカメラ認識ができなくなり衝突するという事故がありましたが、運転が上手なドライバーでもどのくらいの割合で事故回避できたでしょうか?
高性能のカメラで認識できないことを認識して、瞬時に回避操作をすることを求められているわけです。
期待値を下げるための設計(及び営業)課題:
- 対応可能レベルの明確化と周知
衝突回避自動ブレーキ技術が市場導入された際にも、当初はぶつかることが無いという過剰信頼が発生してしまいました。そこで「この装置は運転支援するものであり、対応できない場合もあるので注意が必要です」というようにユーザの意識を変える活動も展開されました。
危険状態に近いことの認知
トラクション(駆動)、ブレーキ(制動)及び車体姿勢の統合制御技術により、走行路面において左右で摩擦係数の異なるスプリットμ(右側左側でタイヤの滑り方が違う)に対応できるようになった時の話です。
制御技術で対応できるレベルには限界があり、その限界をまたがなければならない場合があります。
例えばスプリットμが次第に大きくなり危険な状態に近づいているとき、制御が無い場合にドライバーは滑りを感じたり、車の姿勢変化によって限界に近いことを認知できるため、心の準備や適切な対処が可能です。
しかし、制御がある場合は、自分の運転技術が優れているという誤解も含めて、危険状態に近いことを認知できません。
これは制御システムの安全対策で行ったセンサの二重化で一つが故障した場合でも同様です。
見かけは全く正常ですが、危険のため二重化が必要だったものが一つになった状態は危険の一歩手前です。
危険状態の認知に関する設計課題:
- 危険状態を通知するケースの設定と通知方法
ロボット運転手又はロボットCA?
上述の運転者の機能で3(緊急対応)、4(事故対応)に関して、自動運転設計課題としては以下があります。
緊急対応や事項対応に関する設計課題:
- GセンサやAIなどを用いて、通常の走行時の振動と地震時の振動を判別して対応するか
- 事故時には、外部サービスネットワークと乗員とのインターフェィス機能を行うか
それでは最後に、6.の「同乗者の対応をする」についてはどうでしょうか?
乗員の状況観察と外部への通報は自動運転車で技術的に可能になると思いますが、その次の対応として人間ならできる現場緊急対処は、自動運転車ではできないこともあります。
ロボット運転手またはロボットCA(キャビンアテンダント)が必要?・・・これには、技術とコストそしてスペースが課題となりますね。
オプション設定で対応? 現場緊急対処はあきらめる?
登山のように、原則自動運転車には一人で乗車することは不可とする?
同乗者対応に関する設計課題:
- 乗員に対する緊急現場対処サービスのコンセプト設計
技術レベルがどれだけ高度になっても、設計課題とは尽きることがないものですね。
(アイアール技術者教育研究所 H・N)