LiDAR技術の全体像がこれでわかる!仕組み・方式・課題・技術トレンドを総まとめ

現代のモビリティおよびロボティクス技術では、周辺環境を精密に把握する「眼」の役割の重要性が高まっています。その中核を担う技術が「LiDAR」(Light Detection and Ranging、ライダー)です。
「LiDAR」とは、レーザー光を照射し、対象物に反射して戻ってくる光の往復時間、位相差、反射光との周波数差などを測定することで、物体までの距離や形状を三次元的に把握するセンサです。かつては巨大で高価な研究用デバイスでしたが、現在は自動運転車、スマートフォン、産業用ロボット、さらにはドローンを用いた測量など、私たちの身近な場所で急速に普及が進んでいます。
本記事では、LiDARの基礎から方式の分類、最新の動向までを包括的にわかりやすく解説します。
目次
1.物体認識の各種検出方法とLiDAR
(1)パッシブ検出とアクティブ検出
パッシブ検出は、対象物や環境が自ら発しているエネルギー(光、熱、音など)を捉えて検出する仕組みです。
一方、アクティブ検出は、センサ自身がエネルギー(光、電磁波、音など)を発射し、それが物体に当たって返ってきた反応(反射波)を検出・分析する仕組みです。
図1にパッシブ検出とアクティブ検出の例をまとめて示します。
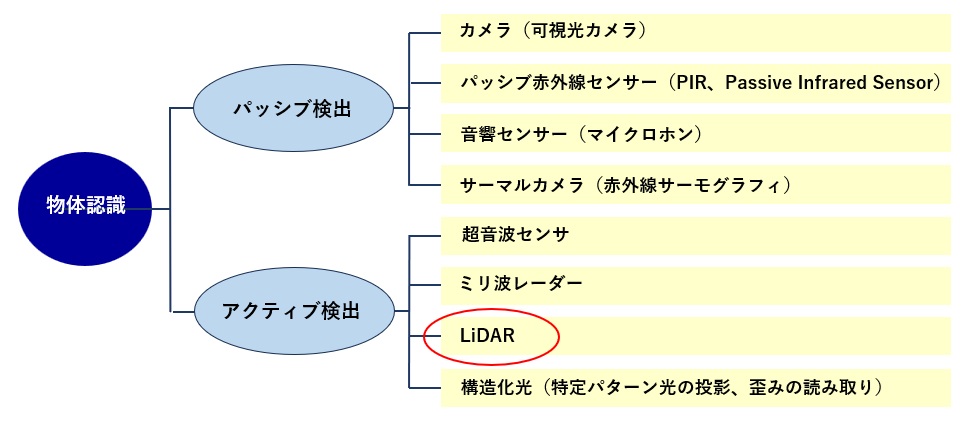
【図1 物体認識の各種検出方法】
LiDARでは、光を発射し、それが物体に当たって返ってきた反応(反射波)を検出・分析します。
LiDARが直接捉えるデータは、照射された点に対する距離、空間位置(座標)あるいは反射強度ですが、膨大な照射点(点群データ:Point Cloud)を統合することで、三次元形状を認識することができます。点群データをクラスタリングや機械学習などのアルゴリズムで処理することで、対象が歩行者なのか、車両なのか、あるいはガードレールなのかを識別できるようになります。
また、連続して取得した点群データにおける座標変化を追跡することで、物体の移動速度や進行方向を推定することができます。さらに、FMCW方式のようにドップラー効果を利用する方式では、反射光の周波数変化から対象物の相対速度を推定することも可能です。
LiDARは一般にレーザー光を用いる距離計測技術として説明されます。名称上の「Light」は光を意味しますが、実用上は高い指向性・単色性・時間応答性を持つレーザー光源が中心です。
なお、LEDなどレーザー以外の光源を用いた距離画像センサも存在しますが、一般的な車載・測量向けLiDARとは区別して扱われることが多いです。光源としてLEDを用いるタイプを「LED-LiDAR」と呼ぶ場合もあり、レーザーを用いるLiDARに比べて指向性や空間分解能は低くなりやすい一方、低コスト化しやすいため、近距離検知や簡易的な空間認識用途で利用される場合があります。
(2)他のセンサとLiDARとの差異
LiDARと同じアクティブセンサである「超音波センサ」や「ミリ波レーダー」を、波(音波または電磁波)の特性について比較すると表1のようになります。
【表1 各センサの波の特性】
| 項目 | 超音波センサ | ミリ波レーダー | LiDAR |
| 波の種類 | 音波(疎密波) | 電磁波(電波) | 電磁波(光/赤外線) |
| 主な周波数 | 20kHz~200kHz | 24GHz/60GHz/77~81GHz | 約190~330THz程度、使用波長に依存 |
| 主な波長 | 約1.7mm~17mm | 約4~13mm程度 ※24GHz帯、77~81GHz帯の場合 | 主に905nm帯、1550nm帯など |
| 伝播速度 | 約340m/s(音速) | 約3億m/s(光速) | 約3億m/s(光速) |
| 検知距離 | 短距離(数cm~数m) | 中・長距離(~200m以上) | 中・長距離(~200m以上) |
波の性質には、「波長が短いほど直進性が高く、分解能(解像度)が上がる」一方で、「波長が長いほど回折しやすく、障害物や悪天候に強い」というトレードオフがあります。以下に各センサの特徴、メリット、デメリットをまとめます。
① LiDAR:高い「空間分解能」
- 特徴: 波長がナノメートル単位(ミリ波の約1,000分の1以下)と極めて短いため、光が広がりにくく、物体の「形」を詳細に捉えることができます。
- メリット: 周囲の3Dマップ作成や、歩行者と電柱を識別するような精密な検知が得意です。
- デメリット: 雨粒や霧、雪などの微粒子によって光が散乱・減衰しやすく、悪天候下では性能が低下する場合があります。
② ミリ波レーダー:悪天候に強い「環境耐性」
- 特徴: 波長が光より長いため、雨・霧・塵などによる散乱や減衰の影響を受けにくく、悪天候下でも比較的安定して検知できます。
- メリット: 豪雨や濃霧の中でも安定して前方の車両などを検知できます。また、ドップラー効果を利用して物体の「相対速度」を直接計測するのが得意です。
- デメリット: LiDARに比べると分解能が低く、物体の詳細な形状を特定するのは苦手です。
[※関連記事:ミリ波レーダーとは何か?仕組みや特徴、LiDARとの比較など徹底解説!]
③ 超音波センサ:近距離の「確実性」
- 特徴: 他の2つと異なり「空気の振動(音)」を使います。波長はミリ波に近いですが、伝播速度が圧倒的に遅いため、ごく近距離の計測に適しています。
- メリット: ガラスのような透明な物体など、光学センサでは検出しにくい対象でも、表面で音波が反射すれば検知できます。
- デメリット: 音速は気温や風の影響を強く受けるため、長距離や高速移動中の計測には向きません。
[※関連記事:超音波センサの基礎知識を徹底解説|仕組み・特徴・使用例などがこれ一つでわかる!]
自動運転で併用されるカメラも含めLiDARと比較すると、LiDARの立ち位置が明確になります。
以下表2に、他のセンサの特徴とLiDARとの差異を示します。
【表2 他のセンサの特徴とLiDARとの差異】
| センサ | 利点 | 欠点 | LiDARとの差異 |
| カメラ | 色・文字認識が可能、安価 | 距離測定に弱く、天候に左右される | LiDARはRGB画像のような色・文字情報の取得は苦手だが、距離・形状の取得に優れる |
| ミリ波レーダー | 悪天候(雨・雪)に非常に強い | 解像度が低く、物体の形状把握が困難 | LiDARは分解能が高く、物体の「形」を緻密に描ける |
| 超音波センサ | ごく近距離に強い、非常に安価 | 検知距離が短く、精度も低い | LiDARは中長距離(数十~数百メートル)の精密測定を担う |
2.LiDARの測距方式
LiDARの測距方式には、図2に示すように「ToF」(Time of Flight)や「FMCW」(Frequency Modulated Continuous Wave、周波数変調連続波)など、いくつかの種類があります。

【図2 LiDARの測距方式】
(1)直接ToF・間接ToF
- 直接ToF: レーザーをパルス状に発射し、戻ってくるまでの時間を直接タイマーで計測します。長距離測定(200m以上)に向いており、車載用LiDARの主流です。
- 間接ToF: 発射光を変調し、戻ってきた光との位相差から距離を求める方式です。比較的近距離の距離画像取得に使われることが多く、屋内用の3Dカメラや一部の距離画像センサで利用されています。なお、スマートフォンに搭載されるLiDAR/深度センサには直接ToF系のものもあり、機種やセンサ構成によって方式は異なります。
(2)FMCW
FMCWは、連続波レーザーの周波数を時間的に変化させながら照射し、反射光との周波数差、すなわちビート周波数から距離を求める方式です。
また、ドップラー効果による周波数変化を利用することで、対象物の相対速度も推定できます。外乱光や他のLiDARからの干渉を受けにくい点も特徴で、FMCW LiDARは次世代LiDARの有力候補の一つとして開発が進められています。
[※関連記事:FMCW(周波数変調連続波)とは?光計測技術の前提知識から解説]
(3)その他
ToF、FMCW以外にも、「AMCW」(振幅変調連続波、Amplitude Modulated Continuous Wave)方式などがあります。
車載用途では直接ToF方式が広く用いられており、FMCW方式も次世代方式の有力候補として開発が進められています。
3.LiDARの走査方式
光をどの方向に飛ばすかというスキャン(走査)の方法には、図3に示すものがあります。
走査方式はLiDARの信頼性とコストに直結します。
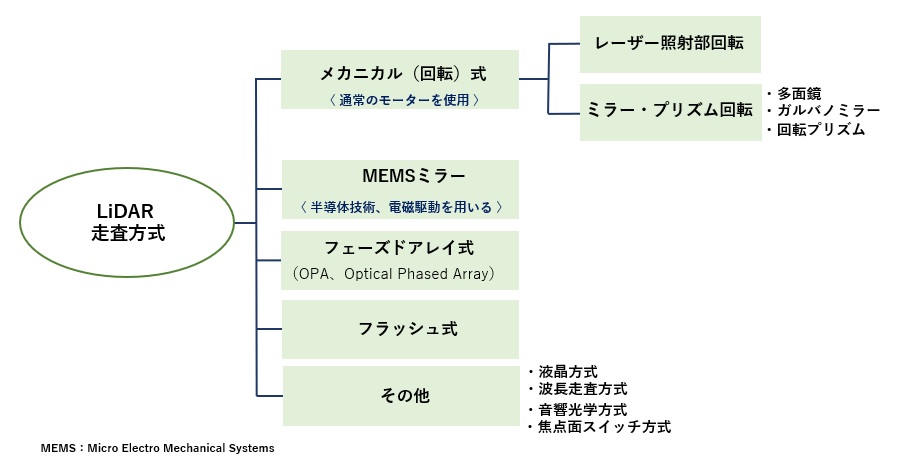
【図3 LiDARの走査方式】
(1)メカニカル(回転)式
レーザー照射部やミラーをモーターで物理的に360度回転させる方式です。
360度の広い視野角を確保できますが、サイズが大きく、駆動部の摩耗(寿命)が課題です。自動運転の実験車両の屋根に乗っている「回転灯」のようなデバイスがこれに当たります。
ミラー回転式では、光源は固定し、内部のポリゴンミラー(多面鏡)などのミラーを回転させて光を反射させます。高いスキャン速度を得られますが、可動部があるため衝撃への対策が必要です。
(2)MEMS式
微小な鏡(MEMSミラー)を電気的に振動させてビームを反射・走査する方式です。大型のモーターでセンサ全体やミラーを回転させるメカニカル式に比べて、小型化しやすく、量産性にも優れるとされています。
LiDARの走査方式では、機械的な可動部を持たない、または可動部を極力減らした方式を「ソリッドステート式」と呼ぶことがあります。ただし、MEMS式ではMEMSミラー自体が微小に動くため、完全に可動部がない方式ではありません。そのため、MEMS式はメカニカル式と完全なソリッドステート式の中間的な方式として扱われることがあります。
(3)フェーズドアレイ式(OPA、Optical Phased Array)
光の位相を制御することで、物理的な可動部を一切持たずにビームの方向を変える方式です。
「究極のLiDAR」と呼ばれる場合もあり、チップ化が可能です。耐久性が極めて高く超小型化が期待されていますが、技術的難易度が高く、現在は開発段階のものが中心です。
(4)フラッシュ(Flash)式
カメラのフラッシュのように、一度の照射で広範囲に光を当て、面で受光する方式です。
機械的な走査機構を持たないソリッドステート型です。構造がシンプルで信頼性が高いですが、光を分散させるため、遠くのものを測るには非常に強い出力が必要です。
(5)その他
その他の走査方式としては以下のようなものがあります。
- 液晶方式: 液晶を用いてビームステアリングを行います
- 波長走査方式(Wavelength Tuning / Spectral Scanning): レーザーの波長を変化させ、回折格子などの光学素子を利用して出射方向を制御する方式です。
- 音響光学方式(Acousto-Optic Beam Steering): 結晶の中に音波(超音波)を流し、光の進路を曲げる方式です。
- 焦点面スイッチ方式(Focal Plane Switch: FPS): 多数の発光素子(Emitter)を並べ、光らせる場所を高速で切り替える方式です。
4.車両におけるLiDARの適用例
(1)車両搭載
LiDARやその他のセンサが、車両のどこにどのような目的で搭載されるのかを図4にまとめました。
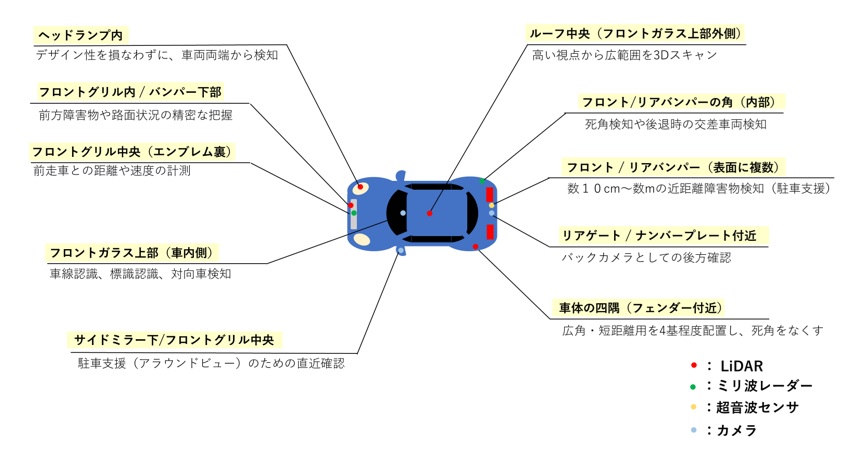
【図4 センサの車両搭載位置例】
車両における各センサの搭載位置は、そのセンサが「何を、どの距離で、どの範囲で見たいか」という目的と、デザイン性やセンサ保護の必要性によって決まります。
当然ながら搭載するセンサの種類と個数は車両コストあるいは車両システム開発コストに影響が大きいため、車両の種類や戦略によって変わってきます。
(2)LiDARと他の車両センサとのフュージョン技術
例えば、「色」や「文字」を判別しようとするとLiDAR単体ではできないため、カメラとのフュージョン(統合)認識技術が必須です。
- Early Fusion: センサの生データ、またはそれに近い段階で統合する方式。情報量は多い一方、時刻同期や座標変換、計算負荷が課題となる。
- Middle Fusion: 各センサから抽出した特徴量を統合する方式。AIベースの認識処理で用いられることが多い。
- Late Fusion: 各センサが個別に物体を認識した後、その認識結果を統合する方式。実装しやすく信頼性を確保しやすい一方、センサ間の情報を深く活用しにくい。
これにより、例えば、LiDARが取得した物体の位置・形状情報に、カメラが取得した信号機の色や標識、車線などの意味情報を組み合わせることで、より高度な周辺環境認識が可能になります。
5.車両以外でのLiDARの適用例
(1)実用化されているもの
- 土木・測量: ドローンに搭載し、上空から地形をスキャン。森林の樹木の下にある地表面まで正確にデータ化できます。
- スマートフォン: AR(拡張現実)の精度向上や、部屋の3Dスキャンに利用。
- AGV(無人搬送ロボット): 工場や倉庫内での衝突防止・自己位置推定(SLAM)。
(2)開発中のもの(今後の可能性)
- スマートシティ: 交差点のポールにLiDARを設置し、死角にいる歩行者を検知して車両に通知するインフラ協調システム。
- 介護・見守り: プライバシーを保護しつつ(顔を詳細に映さない)、転倒などの動きだけを検知する高齢者見守りセンサ。
6.LiDAR開発トレンドにおけるフォーカス技術
(1)LiDARの部品・ハードウェア
- 長波長化(1550nm):
1550nm帯は網膜まで到達しにくいため、905nm帯に比べてアイセーフ設計上有利とされます。そのため、レーザー安全規格を満たしながら比較的高い出力を確保しやすく、長距離検知への応用が期待されています。 - シリコンフォトニクス:
光回路を半導体チップ上に集積し、劇的な小型化と低コスト化を目指す技術。PCのCPUのようにLiDARを量産でき、大幅なコストダウンが期待されています。 - SPAD(単一光子アバランシェダイオード):
1個の光子すら検知できる超高感度センサ。低電力で遠方まで検知可能にするため、CMOSプロセスへの集積化が進んでいます。 - ASIC/SoC化:
信号処理回路を専用の集積回路(ASIC)にまとめ、消費電力の低減と処理スピードの向上を図っています。
(2)LiDARの制御・ソフトウェア
- ポイントクラウドの圧縮とノイズ除去:
膨大な点群データをリアルタイムで圧縮。また、雨や雪、霧による誤検知(浮遊物からの反射)をAIアルゴリズムでリアルタイムに除去する技術が進化しています。 - エッジAIによる物体識別:
LiDAR内部のプロセッサで、点群から「車両」「歩行者」「自転車」などをセグメンテーション(色分け)して出力。後段のECUの負荷を軽減します。 - 動的スキャン制御:
注視したい領域(関心領域:ROI、Region of Interest)に対し、スキャン密度を動的に高める制御。高速走行時は遠方を、右左折時は側方を重点的にスキャンします。
(3)LiDARを利用したシステム
LiDARで得られた「高精度な3D情報」をどう車両制御に活かすかのフェーズです。
- センサフュージョン(カメラ+LiDAR):
カメラの「色・意味情報」とLiDARの「正確な距離・形状」をピクセルレベルで統合。夜間や逆光時でも、カメラが見落とした歩行者をLiDARが補完し、緊急ブレーキ(AEB)の作動精度を劇的に向上させています。 - 高精度地図(HDマップ)とのマッチング:
LiDARで捉えた周囲の建物や標識の配置を、事前に持つ3D地図と照合。GPSが届かないトンネルやビル街でも、条件が整えば数センチ級の高精度な自車位置推定(ローカライゼーション)を実現します。 - オキュパンシーグリッド(占有格子マップ):
「道に何があるか」ではなく「どこが通れるか(空いているか)」を格子状に判断。未知の障害物や崩れた道路など、AIが学習していない対象物に対しても安全な軌道計画を立てる制御に使われます。
7.まとめ
LiDARは、単なる距離計から、社会の「空間認識インフラ」へと進化を遂げようとしています。
かつて数千万円したシステムは、現在では数十万円、量産化や半導体集積化の進展により、今後もさらなる低コスト化が期待されています。
走査方式のソリッドステート化や、FMCW方式による性能向上、そしてソフトウェアによるデータ処理技術の高度化が相まって、LiDARは自動運転の安全性を担保するだけでなく、ロボティクスや都市DX(デジタルトランスフォーメーション)を支える基盤技術として、今後も中心的な役割を果たし続けるでしょう。
(日本アイアール株式会社 特許調査部 H・N)